
ژوئن
بررسی عوامل موثر در کارایی توربین های گاز جهت احداث نیروگاه گازی در منطقه عسلویه و چگونگی افزایش بازدهی کلی این نیروگاه
اکثر نیروگاههایی که در کشور احداث شده اند یا در حال احداث می باشند ، نیروگـاه گـازی مـی باشـند. از معایب نیروگاه گازی ساده، وابستگی آن به شرایط محیطی و اتلاف حرارت بسیار زیاد ناشی از دمـای بـالای گازهای خروجی از توربین را می توان نامبرد. در این پروژه با توجه به تعـدد نیروگاههـای گـازی در منطقـه عسلویه این منطقه جهت تحقیق انتخاب شده است.
در این پروژه هدف بر این است که بدون تداخل بـا اجـزاء سـیکل اصـلی نیروگاههـای گـازی در کـشورمان(توربین ، کمپرسور و محفظه احتراق) روشهایی جهت بهینه سازی نیروگاه ارائه شـود تـا بتـوان بـا سـاختارموجود توان و بازدهی نیروگاه گازی را افزایش داد.
در منطقه عسلویه که در مجاورت میدان گازی پارس جنوبی قرار دارد ، واحدهای متعدد و وسیع پالایشگاهی احداث گردیده اند . در صنایع نفت و پتروشیمی به علت نیاز شدید این صنایع به برق ، در مجاورت واحد صنعتی یک نیروگاه احداث می گردد تا مستقل از شبکه به تولید برق مطمئن وپایدار بپردازد.
در واحدهای پالایشگاهی به علت سهولت نصب و راه اندازی و بهره برداری از نیروگاههای گازی استفاده می شود به گونه ای که این امر در منطقه عسلویه کاملا مشهود است.لذا دراین پروژه با توجه به تعدد نیرگاههای گازی در منطقه عسلویه ، این منطقه به عنوان مبنای تحقیق در نظر گرفته شده است.
در نیروگاه گازی ، اکثرگاز ورودی به توربین که مولد قدرت است هوای محیط است . لذا باید ابتدا تاثیر مشخصات هوای محیط بر کارایی توربین گاز مشخص شود . سپس با توجه به چگونگی تاثیر مشخصات هوای محیط و سایر موارد بر کارایی نیرو گاه گازی ، به بررسی روشهای افزایش توان وبازدهی نیرو گاه پرداخته شود.
بازدهی و توان خروجی از نیر وگاه گازی تابع شرایط محیطی می باشد. در این پروژه منطقه عسلویه با شرایط آب و هوایی گرم و مر طوب در نظر گرفته شده است. جهت بالاتر بردن کارایی نیروگاه گازی سه روش کلی وجود دارد.
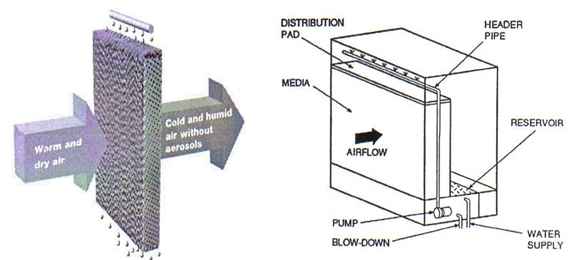
بالا بردن دبی جرمی سیال ورودی به کمپرسور باعث بالا رفتن توان خروجی و بازدهی نیروگاه می شود.این روش با خنک کردن هوای ورودی به کمپرسور انجام می شود، در این پروژه روش تبخیری و استفاده از چیلر جذبی مورد بررسی قرار گرفته است. استفاده از خنک کن تبخیری هزینه سرمایه گذاری اولیه پائین تر و نصب و را ه اندازی آسان تر خواهد داشت ، در صورتیکه استفاده از چیلر جذبی جهت خنک کردن هوای ورودی کارایی بالاتری خواهد داشت و هوای ورودی مستقل از شرایط محیطی به درجه حرارت ثابت خواهد رسید.
استفاده از دمای بالای گاز های خروجی از توربین که بالاتر از Co500 می باشند باعث جلوگیری از اتلاف انرزی خواهد گردید، که مناسب ترین روش، نصب بویلر بازیافت حرارتی در خروجی توربین جهت تولید بخار است.
بالا بردن دبی جرمی گاز ورودی به توربین نیز منجر به بالا رفتن کارایی نیروگاه گازی خواهد گردید، جهت این امر وابسته به سازنده توربین و به یک نسبت مجاز بخار تولیدی توسط بویلر بازیافت حرارت به محفظه احتراق تزریق می شود.
جهت دانلود فایل کلیک کنید
فهرست مطالب کارایی توربین های گاز و چگونگی افزایش بازدهی نیروگاه
- فصل اول:کلیات
- پیشینه تحقیق
- روش کار وتحقیق
- فصل دوم: بررسی سیکل نیروگاه گازی و عوامل موثر بر کارایی آن
- سیکل ایده آل توربین گازی
- سیکل واقعی توربین گازی
- خواص سکون
- بازدهی توربین و کمپرسور
- ضریب تاثیر مبدل حرارتی
- تلفات مکانیکی
- تغییرات گرمای ویژه در سیکل و مشخصات سوخت مصرفی
- نسبت سوخت به هوا ، بازدهی احتراق و بازدهی سیکل
- بررسی عوامل محیطی موثر بر کارایی نیروگاه گازی
- تاثیر دمای محیط بر عملکرد نیروگاه گازی
- تاثیر رطوبت هوای محیط بر عملکرد نیروگاه گازی
- تاثیر فشار هوای محیط بر عملکرد نیروگاه
- سیکل ایده آل توربین گازی
- فصل سوم: بالا بردن کارایی و بازدهی نیروگاه
- خنک کردن هوای ورودی به توربین گاز با استفاده از روش تبخیری
- آشنایی با خنک کننده تبخیری و اجزاء آن
- مدلسازی خنک کننده تبخیری
- معادلات حاکم در نوار ریزش آب
- معادلات حاکم در جریان هوا
- حل روابط حاکم بر خنک کننده تبخیری
- عملکرد خنک کننده تبخیری در نیروگاه گازی
- خنک کردن هوای ورودی به توربین گاز با استفاده از روش رطوبت گیری تبخیر
- آشنایی با چرخ رطوبت گیر
- مدلسازی چرخ رطوبت گیر
- حل عددی معادلات چرخ رطوبت گیر
- خنک کردن هوای ورودی به توربین گاز با استفاده از چیلر جذبی
- ساختار چیلر جذبی
- بررسی روابط ترمودینامیکی در نقاط مختلف چیلر جذبی
- استفاده از حرارت گازهای خروجی از توربین گاز
- تزریق بخار به محفظه احتراق
- آشنایی با بویلر بازیافت حرارت
- ترکیب سیکل نیروگاه گاز ی با تزریق بخار و خنک کردن هوای ورودی با چیلر جذبی
- خنک کردن هوای ورودی به توربین گاز با استفاده از روش تبخیری
- فصل چهارم : نتیجه گیری و پیشنهادات
- پیوست ها و منابع

