صندلی دوچرخه به عنوان یکی از اجزای اصلی دو چرخه، تاثیر به سزایی بر روی راحتی دوچرخه سوار دارد که این موضوع به صورت یک پارامتر کلیدی در مسابقات دوچرخه سواری در نظر گرفته می شود. طراحی و تحلیل زین دوچرخه براساس ارگونومی بدن زنان و مردان همواره به عنوان یک چالش مهم مورد تحقیق و پژوهش محققان و شرکت های تولیدکننده آن ها قرار گرفته است. در این گزارش با بررسی یک نمونه زین دو چرخه به تحلیل استاتیکی آن براساس نیروی وزن دوچرخه سوار پرداخته می شود. بدین منظور پس از اندازه گیری ابعاد آن مدل سازی هندسه آن در نرم افزار سالیدورکس پرداخته می شود. سپس جهت بررسی اثر وزن دوچرخه سوار، به مدل سازی سه بعدی بخشی از بدن آن پرداخته می شود.
در ادامه به منظور تحلیل زین دوچرخه براساس وزن دوچر خه سوار براساس تعریف خواص مواد به کار رفته، شرایط مرزی و تماس های سازه ای از نرم افزار انسیس استفاده میشود. سپس با تغییر وزن دوچرخه سوار به بررسی اثر مقدار وزن آن بر روی عملکرد استاتیکی زین دو چرخه پرداخته می شود. در نهایت با بررسی خروجی های تنش و تغییر شکل، به بحث در مورد عملکرد استاتیکی سیستم پرداخته شده و همچنین موقعیت و مقدار ماکزیمم فشار وارد شده استخراج می گردد. همچنین در ادامه با نصب کرنش سنج های مناسب در این مکانها به اندازه گیری نیرو و تغییر شکل مدل پرداخته می شود. لازم به ذکر است که این گزارش به منظور ارائه به تیم ملی دوچر خه سواری کشور انگلستان[۱] در نظر گرفته شده است.
برخی از نتایج
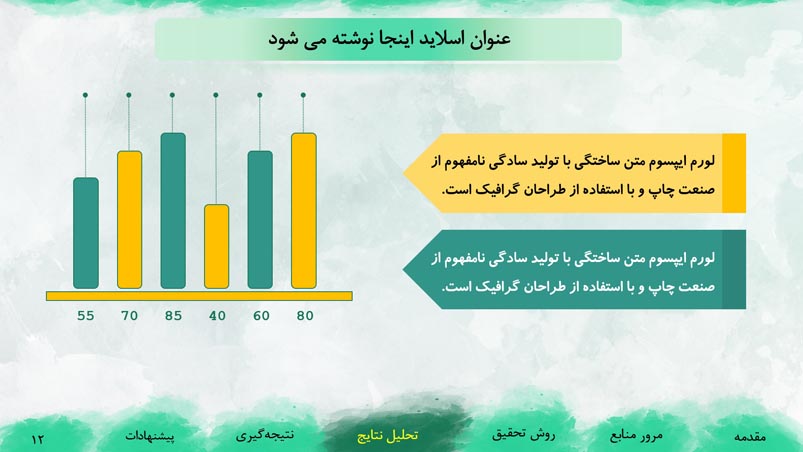
در ادامه با در نظر گرفتن یک محدوده وزنی از ۵۵ کیلوگرم تا ۷۵ کیلوگرم اثر تغییر وزن براساس دوچرخه سوارهای مختلف در نظر گرفته شده است. همچنین به منظور بررسی بهتر موضوع به استخراج نیروها و گشتاورهای وارد شده به میله زین دوچرخه از طرف بدنه پرداخته شد و در نهایت با تعریف تنش تسلیم اجزای به کار رفته براساس منابع [۷,۸] به بررسی ضریب اطمینان زین دوچرخه چرداخته شده است. نتایج حاکی از آن می باشد که با افزایش وزن دو چرخه سوار از ۵۵ به ۷۵ کیلو گرم، تنش ماکزیمم به اندازه ۳۳ درصد افزایش پیدا می کند و ضریب اطمینان آن نیز ۳۴ درصد کاهش پیدا می کند. نیروی وارد شده به میله صندلی از طرف چهارچوب بدنه در راستاهای عمود بر محور آن (محور y) ناچیز می باشد. از طرفی افزایش وزن ۲۰ کیلوگرمی منجر به افزایش ۳۲ درصدی نیروی محوری در راستای میله و همچنین افزایش ۳۱ درصدی گشتاور محور Pitch (حول محور Z) شده است.
جهت دریافت فایل همراه با کدهای شبیه سازی از طریق تلگرام یا تماس (۰۹۳۷۳۹۰۵۸۶۲) با ما در ارتباط باشید.
شرایط مرزی و قید تماس در نرم افزار انسیس ورکبنچ دوچرخه
فهرست مطالب تحلیل استاتیکی زین دوچرخه
مقدمه
مروری بر کارهای انجام شده
روش انجام کار
تحلیل استاتیکی
نتایج
جمع بندی
جهت دریافت فایل همراه با کدهای شبیه سازی از طریق تلگرام یا تماس (۰۹۳۷۳۹۰۵۸۶۲) با ما در ارتباط باشید.
رساله آماده کنترل ارتعاشات لیفتراک به منظور افزایش آسایش سرنشین و پایداری حرکتی
چکیده:
هدف از انجام این رساله ارائه یک مدل جدید به منظور یک بررسی جامع از ارتعاشات بدنه، چرخ ها و بخش حامل بار سیستم لیفتراک است. براین اساس در این رساله با ارائه یک مدل ۶ درجه آزادی معادلات ارتعاشی سیستم لیفتراک استخراج می گردد. سپس به منظور کنترل ارتعاشات این سیستم هنگام عبور از جاده با ناهمواری های مختلف به طراحی یک کنترل کننده پرداخته می شود. بنابراین با اضافه کردن سیستم کنترلی مابین بدنه سیستم لیف تراک و بخش حامل بار آن، ارتعاشات بخش حامل بار و بدنه سیستم لیفتراک کاهش داده می شود. لازم به ذکر است که کنترل ارتعاشات این سیستم به دلیل استفاده بیش ازحد آن در مراکز تولیدی می تواند تاثیر به سزایی بر روی سلامتی و راحتی راننده آن داشته باشد.
.
از طرفی پایداری حرکتی این سیستم نیز به دلیل محیط های کاری خطرناک نیز قابل اهمیت است که وجود نوسانات پیچشی این سیستم ها یکی از دلایل ناپایداری واژگونی آن ها می باشد که با کنترل این نوسانات می توان کمک شایانی به پایداری آن ها کرد. براین اساس ارائه یک مدل جدید براساس رویکرد ارتعاشات بخش های مختلف سیستم لیفتراک و همچنین کنترل ارتعاشات آن به منظور افزایش آسایش سرنشین و پایداری حرکتی آن از اهداف مهم این رساله می باشد. سیستم کنترلی پیشنهاد شده با کاهش ارتعاشات پیچشی بدنه و بخش حامل بار سیستم لیفتراک، عملکرد ارتعاشی خوبی برای کل سیستم لیفتراک ایجاد نموده است. کاهش شتاب عمودی بدنه و صندلی راننده لیف تراک از آثار استفاده از این سیستم کنترلی می باشد که این موضوع می تواند به صورت مستقیم بر روی آسایش راننده در زمان طولانی رانندگی تاثیر مثبتی داشته باشد.
جهت دریافت رساله همراه با کدهای شبیه سازی از طریق تلگرام یا تماس (۰۹۳۷۳۹۰۵۸۶۲) با ما در ارتباط باشید.
مقدمه
کاهش ارتعاشات سازه ها و سیستم های دینامیکی از دیرباز به عنوان یک چالش مهم مورد بحث قرار گرفته است. کاهش ارتعاشات سیستم ها منجر به بهبود عملکرد آن ها می شود. به عنوان مثال میرا نمودن موفق و لرزش و ارتعاشات خودرو، موجب بهبود عمر اجزای خودرو، راحتی سرنشینان و همچنین ثبات فرمان آن می شود. همچنین کاهش ارتعاشات سازه های بلند و پل ها نیز از اهمیت بسیاری برخوردار است به طوریکه بیشترین سهم تحقیقات در این زمینه مربوط به استفاده از سیستم های کنترلی غیرفعال و نیمه فعال براساس دمپرهای مختلف ازجمله دمپرهای الکترو-مغناطیسی می باشد[۱]. یکی از سیستم های دینامیکی مهم در کارخانجات، لیفتراک های حامل بار می باشند که انواع مختلفی از این سیستم وجود دارد که کارخانجات صنعتی براساس نیازشان از آن ها استفاده می کنند.
.
استفاده از آن ها به منظور جابه جایی بارهای سنگین توانسته کمک شایانی به نیروی انسانی و چرخه تولید در کارخانه های صنعتی بکند. با توجه به جا به جایی مدوام این سیستم، وجود ارتعاشات در هر بخش از آن می تواند منجر به خسارت های مالی و جانی شود به طوریکه با انتقال ارتعاشات به بخش کابین راننده، امکان سلب آسایش راننده براساس نویز های به وجود آمده براساس این ارتعاشات وجود دارد. از طرف دیگر وجود ارتعاش در بدنه بخش حامل بار بسیار با اهمیت می باشد و وجود نوسان در این قسمت منجر به کاهش زمان مفید فعالیت سیستم لیف تراک می شود.
به طوریکه به منظور تخلیه بار، راننده مجبور به توقف کامل سیستم می شود و همچنین به دلیل نوسانات قسمت حامل بار و احتمال ناپایدار شدن سیستم، راننده مجبور به حرکت با سرعت پایین در هنگام جابه جا کردن بارها می باشد. بدین منظور در این بخش به بررسی روش ها و سیستم های کنترلی مختلف پرداخته می شود و نقاط قوت و ضعف آنها مورد بحث قرار می گیرد.
جهت دریافت رساله همراه با کدهای شبیه سازی از طریق تلگرام یا تماس (۰۹۳۷۳۹۰۵۸۶۲) با ما در ارتباط باشید.
۱-۲- سیستم لیفترک
لیفتراک وسیلهای است که دو شاخک در جلوی خود دارد و از آن برای بالا و پایین بردن وسایل و همچنین جابهجایی آنها استفاده میشود. این ماشین دارای یک دکل، شاخک و الحاقیات است که با توجه به نوع فعالیت آنها در انبار کردن بار، حملونقل و جابجایی طراحی و ساخته میشود. در شکل زیر یک نمونه لیفتراک تولیدشده توسط شرکت Baoli نشان داده شده است[۲].
شکل (۱-۱) زیر یک نمونه لیفتراک تولیدشده توسط شرکت Baoli [2]
استفاده از این وسیله در محلهایی که ساختوساز بیشتر است کاربرد ویژهای دارد زیرا این دستگاه بهراحتی میتواند مصالح و وسایل ساختمانی را بلند کرده و به هرجایی منتقل کند. لیفتراکها در انبارها بهراحتی و در سطوح وسیع میتوانند وسایل را جابهجا کنند. شاخکهای این وسیله میتوانند بالاتر از خود لیفتراک بالا برود و وسایل را در بالاترین سطح وسایل دیگر قرار دهند و به همین دلیل بهآسانی میتوانند برای بارگیری کامیونها از این وسیله استفاده کرد.
۱-۳- انواع لیفتراک بر حسب نوع موتور
یکی از مهمترین قسمتهای لیفتراک، موتور لیفتراک است که تأمینکننده قدرت و گشتاور لازم برای کارکرد لیفتراک هست. امروزه در لیفتراکها از انواع مختلف سوخت برای به کار انداختن موتور آن استفاده میشود. دیزل، بنزین، گاز و بنزین و نیروی الکتریکی از مهمترین آنهای میباشند. سوخت این ماشین به محل مورد استفاده آن بستگی دارد که معمولاً برقی، فسیلی و یا گازی است[۳].
جهت دریافت رساله همراه با کدهای شبیه سازی از طریق تلگرام یا تماس (۰۹۳۷۳۹۰۵۸۶۲) با ما در ارتباط باشید.
۱-۳-۲- لیفتراک دیزلی
لیفتراکهای دیزل جهت استفاده در محیطهای باز ایده آل هستند زیرا بخار اگزوز و ذرات دیزل در فضای باز پراکندهشده و مسائل زیستمحیطی و بهداشتی و ایمنی را که ممکن است در داخل ساختمان اتفاق بیفتد را در برنمیگیرد. با این وجود، کاتالیزورها و تصفیهکنندههای اگزوز میتوانند انتشار گازهای مضر را کاهش داده و لیفتراکها را برای استفاده در محیطهای بسته نیز قابلاستفاده کنند[۳].
از معایب لیفتراک های دیزلی می توان به موارد زیر اشاره کرد:
پر سروصدا هستند و گازهای خروجی میتواند برای بعضی افراد دارای بیماریهای خاص مضر باشد. همچنین در صورت استفاده در محیطهای بسته ممکن است آلارم های دود را فعال نماید.
اندازه بزرگ آنها بدان معنی است که به فضای بیشتر برای کار نیاز دارند اما این مسئله معمولاً در هنگام استفاده در محیطهای باز مشکلی به وجود نمیآورد.
قیمت اولیه آنها کمتر از لیفتراک برقی است اما معمولاً کمی بیشتر از یک دستگاه دوگانهسوز قیمت دارند. هزینههای تعمیر و نگهداری آنها از لیفتراک الکتریکی بیشتر، اما از یک لیفتراک دوگانهسوز کمتر است.دانلود رساله مهندسی مکانیک ۱-۳-۳- لیفت تراک دوگانهسوز (گاز LPG و بنزین)
لیفتراکهای LPG (گاز مایع) به دلیل قیمتگذاری رقابتی و مناسب بودن برای استفاده در محیطهای باز و بسته و راحتی کارکرد، بسیار محبوب هستند. موتور این لیفتراکها مشتقی از همان موتور دوگانهسوز مورداستفاده در خودروها هستند که درنتیجه قطعات بهراحتی در قیمتهای مناسبی در دسترس هستند. لیفتراک LPG از دیزلیها بیصداتر هستند و بخار اگزوز آنها نسبت به لیفتراک دیزلی آلایندگی بسیار کمتری دارد. کاتالیزور اگزوز در دماهای بالا عملکرد بهتری نسبت به لیفتراکهای دیزلی دارد. سرعت جابجایی، میزان شتاب و سرعت بالابری زیاد لیفتراک دوگانهسوز جای رقابتی برای دیگر انواع لیفتراک باقی نمیگذارد[۳].
از معایب این لیفتراک ها نیز می توان به موارد زیر اشاره کرد:
درحالیکه قیمت آنها از دیگر مدلها ارزانتر است، نگهداری و همچنین هزینه سوخت بالاتری دارند.
همانند لیفتراکهای دیزل باید برای سرویس زمستانه از ضدیخ استفاده شود.
۱-۳-۴- لیفتراک الکتریکی
لیفتراکهای برقی کاملاً دوستدار محیطزیست هستند. دود نمیکنند و هیچ آلایندگی مضری ندارند. کاملاً بیصدا هستند و با توجه به وزن کمتر باتری که خود همان باطری بهعنوان وزنه تعادل عمل میکند اندازه کوچکتری دارند و بسیار روانتر حرکت میکنند. هزینه شارژ باتری در تعرفههای ارزان کمتر از هزینه سوخت گاز و یا دیزل است. لیفتراکهای الکتریکی بهطورکلی سادهتر از لیفتراکهای موتور دیزل و گازسوز کار میکنند چون فقط یک پدال گاز و یک پدال ترمز دارند و دندهای فارغ از اتومات یا دستی بودن ندارند. هزینههای نگهداری و تعمیر و نگهداری لیفتراکهای الکتریکی به میزان قابلتوجهی کمتر از لیفتراکهای دیزل و گازسوز است. استاکر، کانتر بالانس، ریچتراک از انواع لیفتراکهای برقی میباشند[۳].موضوعات رساله مهندسی مکانیک از معایب این لیفتراک ها نیز می توان به موارد زیر اشاره کرد:
• هزینه اولیه بالاتر به دلیل باتری و شارژر گرانقیمت خود یک عیب بزرگ است.
• همچنین امکان استفاده از آنها در زمان شارژ وجود ندارد، مگر اینکه یک دست باطری اضافی تهیه شود،که این امر خود به هزینه اضافه میکند.
• لیفتراکهای الکتریکی نیاز به یک سطح صاف برای کارکردن دارند. استفاده زیاد از حد در سطوح شیبدار شارژ باتری را بهسرعت کاهش میدهد، اما میتوان با تهیه باتری قویتر این مسئله را عیب تلقی نکنیم.
• کارکرد لیفتراک برقی در مناطق شرجی هنوز هم یک مسئله است زیرا آبوهوای مرطوب باعث مشکلاتی در سیمکشی و قطعات الکتریکی میشود.مدل چند عضوی لیفتراک جهت دریافت رساله همراه با کدهای شبیه سازی از طریق تلگرام یا تماس (۰۹۳۷۳۹۰۵۸۶۲) با ما در ارتباط باشید.
فهرست مطالب
فصل ۱: کلیات تحقیق ۲
۱-۱- مقدمه ۳
۱-۲- سیستم لیفتارک ۴
۱-۳- انواع لیفتراک بر حسب نوع موتور ۵
۱-۳-۲- لیفتراک دیزلی ۵
۱-۳-۳- لیفتراک دوگانهسوز (گاز LPG و بنزین) ۶
۱-۳-۴- لیفتراک الکتریکی ۷
۱-۴- اهداف پژوهش ۸
۱-۵- اهمیت پرداختن به موضوع ۹
۱-۶- نوآوری تحقیق ۱۰
۱-۷- مروری بر فصول رساله ۱۱
فصل ۲: مروری بر منابع ۱۳
۲-۱- مقدمه ۱۴
۲-۲- کنترل مسیر لیفتراک ۱۴
۲-۳- ارتعاشات بدنه لیفتراک ۱۶
۲-۴- ارتعاشات وارد شده به واحد حمل بار ۱۸
۲-۵- جمع بندی روش های انجام شده ۲۷
فصل ۳: مدل سازی و معادلات لیفتراک ۲۹
۳-۱- مقدمه ۳۰
۳-۲- معادلات حرکت سیستم ۳۱
۳-۳- لیفتراک ۳۲
۳-۴- اجزای تشکیل دهنده لیفتراک ۳۳
۳-۵- ویژگی های ایمنی لیفتراکها ۳۵
۳-۵-۱- پایداری لیفتراک ۳۵
۳-۶- مدل سازی سیستم لیفتراک ۳۶
۳-۷- مدل کنترل ارتعاشات ۴۰
فصل ۴: سیستم کنترلی لیفتراک ۴۳
۴-۱- مقدمه ۴۴
۴-۲- سیستمهای کنترل غیر فعال ۴۴
۴-۳- سیستمهای کنترل نیمه فعال ۴۷
۴-۴- روش های کنترل سیستم ها ۴۸
۴-۵- کنترل کننده مود لغزشی ۵۰
۴-۵-۱- کنترل کننده ساختار متغییر با مود لغزان ۵۳
۴-۵-۲- سیستم های با ساختار متغییر ۵۴
۴-۵-۳- کنترل کننده های ساختار متغییر و پدیده لغزش ۵۴
۴-۶- مود لغزشی ۵۵
۴-۷- رفتار سیستم در مود لغزشی ۵۶
۴-۸- مساله کنترلی ۵۷
۴-۹- پیاده سازی SMC 59
فصل ۵: نتایج ۶۲
۵-۱- مقدمه ۶۳
۵-۲- نتایج مدل عددی ۶۳
۵-۳- جاده دست انداز ۶۴
۵-۴- جاده تصادفی ۶۹
۵-۵- پروفیل ناهمواری سطح جاده به عنوان یک تابع اتفاقی ۷۰
۵-۶- نتایج جاده اتفاقی ۷۴
۵-۶-۱- جاده اتفاقی سطح خوب ۷۴
۵-۷- جاده اتفاقی سطح ضعیف ۷۹
۵-۸- آنالیز فرکانسی ۸۳
۵-۹- بررسی راحتی سفر با استفاده از دیاگرام شتاب RMS 84
فصل ۶: جمع بندی و پیشنهادات ۹۰
۶-۱- مقدمه ۹۱
۶-۲- بحث ۹۲
۶-۳- جمع بندی ۹۴
۶-۴- پیشنهادات ۹۶
منابع و مآخذ ۹۷
پیوستها ۹۹
جهت دریافت رساله همراه با کدهای شبیه سازی از طریق تلگرام یا تماس (۰۹۳۷۳۹۰۵۸۶۲) با ما در ارتباط باشید.
فهرست شکل ها
شکل (۱-۱) زیر یک نمونه لیفتراک تولیدشده توسط شرکت BAOLI [2] 4
شکل (۱-۲) انواع لیفتراک ها براساس منبع تولید کننده قدرت آن ها [۳] ۵
شکل (۲-۱) سیستم لیفتراک اتونوموس و بلوک دیاگرام روش کنترلی فیدبک حالت[۱۶] ۱۵
شکل (۲-۲) پیکره بندی سیگنال های لیفتراک های صنعتی [۱۶] ۱۵
شکل (۲-۳) ساختار سخت افزاری و نرم افزاری برای کنترل لیفتراک ۱۶
شکل (۲-۴) محل قرارگیری سنسور شتابسنج و دست انداز BUMP در تست تجربی[۱۸] ۱۷
شکل (۲-۵) نتایج مربوط به شتاب وارد شده به چرخ جلو سمت چپ لیفتراک[۱۸] ۱۷
شکل (۲-۶) شکل مودهای سیستم لیفتراک دو حالت بارگیری کامل و بارگیری نیمه[۲۱] ۱۹
شکل (۲-۷) مدل ساده شده لیفتراک و نمودار تغییرات نیروی بار برحسب زمان[۲۱] ۲۰
شکل (۲-۸) نمودار تغییرات نیروهای وارد شده به بخش جلو و عقب سیستم لیفتراک[۲۱] ۲۰
شکل (۲-۹) شماتیک سیستم لیفتراک و محل قرار گیری سنسور کرنش سنج[۲۲] ۲۱
شکل (۲-۱۰) بلوک دیاگرام روش کنترلی پیش خور و پس خور[۲۲] ۲۱
شکل (۲-۱۱) نمودار تغییر شکل واحد حامل بار در دو حالت ترمز گیری (شکل سمت چپ) و حالت عادی (شکل سمت راست) [۲۲] ۲۲
شکل (۲-۱۲) عملکرد سیستم کنترلی براساس ردیابی خروجی سرعت طولی لیفتراک و ورودی سیستم کنترلی[۲۲] ۲۲
شکل (۲-۱۳) نتایج شبیه سازی فرایند بهنیه سازی واحد حامل بار[۲۳] ۲۳
شکل (۲-۱۴) شماتیکی از سه شکل مود اول بخش سازه بلند[۲۴] ۲۴
شکل (۲-۱۵) راهکار کاهش ارتعاشات سازه براساس روش های PASSIVE [24] 24
شکل (۲-۱۶) دیاگرام روش کاهش ارتعاشات براساس ایده مرجع [۲۴] ۲۵
شکل (۲-۱۷) مدل واقعی بازوی انعطافپذیر و شماتیک آن به همراه عملگر موتور دورانی[۱۵] ۲۶
شکل (۲-۱۸) بلوک دیاگرام دو روش کنترلی فیدبک حالت و LQR [25] 26
شکل (۲-۱۹) پاسخ های سیستم براساس کنترلر LQR و فیدبک حالت[۲۵] ۲۷
شکل (۳-۱) شماتیک یک مدل ساده شده از لیفتراک حامل بار ۳۷
شکل (۳-۲) مدل چند عضوی ارتعاشی لیفتراک براساس بخش های مختلف آن ۳۷
شکل (۳-۳) محل اضافه کردن دمپرها به منظور کنترل ارتعاشات ۴۰
شکل (۳-۴) جزئیات مدل ارتعاشاتی لیفتراک همراه با سیستم کنترلی ۴۱
شکل (۴-۱) یک نمونه دمپر فعال استفاده شده در سازه ها به منظور کاهش ارتعاشات ۴۶
شکل (۴-۲) مسیرهای حرکت در مود لغزشی و پدیده لغزش ۵۵
شکل (۵-۱) نمودار ناهمواری سطح جاده در تماس با تایرهای جلو و عقب ۶۴
شکل (۵-۲) تغییرات زاویه نوسان پیچشی بدنه و بخش حامل بار سیستم لیفت تراک در جاده دست انداز ۶۵
شکل (۵-۳) تغییرات زاویه نوسان پیچشی بدنه و بخش حامل بار سیستم لیفت تراک کنترل شده در جاده دست انداز ۶۵
شکل (۵-۴) تغییرات زمانی جابه جایی بدنه سیستم لیفتراک بدون کنترل کننده و همراه با کنترل شده در جاده دست انداز ۶۶
شکل (۵-۵) تغییرات زمانی جابه جایی صندلی سیستم لیف تراک بدون کنترل کننده و همراه با کنترل شده در جاده دست انداز ۶۷
شکل (۵-۶) تغییرات زمانی شتاب زاویه ای پیچش بدنه برای لیفت تراک بدون کنترل کننده و همراه با کنترل کننده در جاده دست انداز ۶۷
شکل (۵-۷) تغییرات زمانی شتاب عمودی بدنه لیف تراک بدون کنترل کننده و همراه با کنترل کننده در جاده دست انداز ۶۸
شکل (۵-۸) تغییرات زمانی شتاب عمودی صندلی لیفت تراک بدون کنترل کننده و همراه با کنترل کننده در جاده دست انداز ۶۸
شکل (۵-۹) تغییرات مقدار تلاش کنترلی سیستم براساس جاده دست انداز ۶۹
شکل (۵-۱۰) پروفیل جاده به عنوان یک تابع اتفاقی ۷۰
شکل (۵-۱۱) نمودار طبقه بندی ناهمواری های سطح جاده براساس استاندارد ISO8608 [27] 71
شکل (۵-۱۲) ناهمواری سطح جاده اتفاقی با سطح خوب ۷۴
شکل (۵-۱۳) تغییرات زاویه نوسان پیچشی بدنه و بخش حامل بار سیستم لیفتراک در جاده اتفاقی با سطح خوب ۷۵
شکل (۵-۱۴) تغییرات زاویه پیچشی بدنه سیستم لیف تراک ۷۵
شکل (۵-۱۵) تغییرات زاویه نوسان پیچشی بدنه و بخش حامل بار سیستم لیف تراک کنترل شده در جاده اتفاقی با سطح خوب ۷۶
شکل (۵-۱۶) تغییرات زمانی جابه جایی بدنه سیستم لیفتراک بدون کنترل کننده و همراه با کنترل شده در جاده اتفاقی با سطح خوب ۷۶
شکل (۵-۱۷) تغییرات زمانی جابه جایی صندلی سیستم لیفتراک بدون کنترل کننده و همراه با کنترل شده در جاده اتفاقی با سطح خوب ۷۷
شکل (۵-۱۸) تغییرات زمانی شتاب عمودی بدنه برای لیفتراک بدون کنترل کننده و همراه با کنترل کننده در جاده اتفاقی با سطح خوب ۷۷
شکل (۵-۱۹) تغییرات زمانی شتاب عمودی صندلی لیفتراک بدون کنترل کننده و همراه با کنترل کننده در جاده اتفاقی با سطح خوب ۷۸
شکل (۵-۲۰) تغییرات مقدار تلاش کنترلی سیستم براساس جاده اتفاقی سطح خوب ۷۹
شکل (۵-۲۱) ناهمواری سطح جاده اتفاقی با سطح ضعیف ۷۹
شکل (۵-۲۲) تغییرات زاویه نوسان پیچشی بدنه سیستم لیف تراک در جاده اتفاقی با سطح ضعیف ۸۰
شکل (۵-۲۳) تغییرات زاویه نوسان پیچشی بدنه و بخش حامل بار سیستم لیف تراک در جاده اتفاقی با سطح ضعیف ۸۰
شکل (۵-۲۴) تغییرات زاویه نوسان پیچشی بدنه و بخش حامل بار سیستم لیفتراک کنترل شده در جاده اتفاقی با سطح ضعیف ۸۰
شکل (۵-۲۵) تغییرات زمانی جابه جایی بدنه سیستم لیفتراک بدون کنترل کننده و همراه با کنترل شده در جاده اتفاقی با سطح ضعیف ۸۱
شکل (۵-۲۶) تغییرات زمانی جابه جایی صندلی سیستم لیفتراک بدون کنترل کننده و همراه با کنترل شده در جاده اتفاقی با سطح ضعیف ۸۱
شکل (۵-۲۷) تغییرات زمانی شتاب عمودی بدنه برای لیفتراک بدون کنترل کننده و همراه با کنترل کننده در جاده اتفاقی با سطح ضعیف ۸۲
شکل (۵-۲۸) تغییرات زمانی شتاب عمودی صندلی لیفتراک بدون کنترل کننده و همراه با کنترل کننده در جاده اتفاقی با سطح ضعیف ۸۲
شکل (۵-۲۹) تغییرات مقدار تلاش کنترلی سیستم براساس جاده اتفاقی سطح ضعیف ۸۳
شکل (۵-۳۰) دیاگرام شتاب عمودی RMS بر حسب فرکانس برای حد خستگی ۸۶
شکل (۵-۳۱) تغییرات فرکانسی مقدار RMS شتاب عمودی صندلی در جاده با سطح خوب برای لیفتراک کنترل نشده ۸۸
شکل (۵-۳۲) تغییرات فرکانسی مقدار RMS شتاب عمودی صندلی در جاده با سطح خوب برای لیف تراک کنترل شده ۸۸
شکل (۵-۳۳) تغییرات فرکانسی مقدار RMS شتاب عمودی صندلی در جاده با سطح ضعیف برای لیفتراک کنترل نشده ۸۹
شکل (۵-۳۴) تغییرات فرکانسی مقدار RMS شتاب عمودی صندلی در جاده با سطح ضعیف برای لیف تراک کنترل شده ۸۹
در این بخش به ارائه ی دانلود نمونه پروپوزال مهندسی مکانیک در رشته ها و گرایش های مختلف پرداخته می شود. با استفاده از دانلود نمونه پروپوزال مهندسی مکانیک شما می توانید تحقیق خود را کامل کرده و همچنین نحوه ی نگارش نمونه پروپوزال مهندسی مکانیک را به صورت دقیق یاد بگیرید.
لازم به ذکر است نمونه پروپوزال مهندسی مکانیک قرار گرفته، تماما، پروپوزال های آموزش انجام شده توسط دپارتمان پژوهشی سفیر بوده و به منظور کمک به سایر دانشجویان در سایت قرار گرفته است.
بخشهای اصلی تشکیل دهنده نمونه پروپوزال مهندسی مکانیک
الف- عنوان تحقیق به فارسی
الف- عنوان تحقیق به انگلیسی
ج- بیان مسأله اساسی تحقیق به طور کلی
این قسمت شامل تشریح مسأله و معرفی آن، بیان جنبههای مجهول و مبهم، بیان متغیرهای مربوطه و منظور از تحقیق است.
د- اهمیت و ضرورت انجام تحقیق :
میزان نیاز به موضوع، فواید احتمالی نظری و عملی آن و همچنین مواد، روش و یا فرآیند تحقیقی احتمالاً جدیدی که در این تحقیق مورد استفاده قرار میگیرد، بیان می شود. دانلود رایگان پروپوزال
ه- مرور ادبیات و سوابق مربوطه
مختصری از پیشینه تحقیقات انجام شده در داخل و خارج کشور پیرامون موضوع تحقیق بررسی می شود.
و – جنبه جدید بودن و نوآوری در تحقیق :
ویژگی های متمایزکننده تحقیق را بیان می کند.
ز- اهداف مشخص تحقیق (شامل اهداف آرمانی، کلی، اهداف ویژه و کاربردی):
اهدافی است که دانشجو قصد دارد در تحقیق خود به آن بپردازد.
ط- سؤالات تحقیق :
سولاتی است که دانشجو قصد دارد در تحقیق خود به آن پاسخ دهد. دانلود رایگان پروپوزال
ی) فرضیههای تحقیق نمونه پروپوزال مهندسی مکانیک
ک- تعریف واژهها و اصطلاحات فنی و تخصصی ( به صورت مفهومی و عملیاتی):
۵ – روششناسی تحقیق:
الف- شرح کامل روش تحقیق برحسب هدف، نوع دادهها و نحوه اجرا
شامل مواد، تجهیزات و استانداردهای مورداستفاده در قالب مراحل اجرایی تحقیق به تفکیک است.
ب- متغیرهای تحقیق نمونه پروپوزال مهندسی مکانیک
متغیرهای مورد بررسی در قالب یک مدل مفهومی و شرح چگونگی بررسی و اندازه گیری متغیرها بیان می شود.
ج – شرح کامل روش (میدانی، کتابخانهای) و ابزار (مشاهده و آزمون، پرسشنامه، مصاحبه، فیشبرداری و غیره ) گردآوری دادهها :
د – جامعه آماری، روش نمونهگیری و حجم نمونه (در صورت وجود و امکان):
هـ – روشها و ابزار تجزیهوتحلیل دادهها:
و) فهرست منابع و مأخذ نمونه پروپوزال مهندسی مکانیک
رفرنس مربوط به تحقیقات ذکر شده در تحقیق در این بخش قرار می گیرد
در این بخش قصد داریم به ارائه موضوعات مهندسی مکانیک و تحقیق در زمینه مهندسی مکانیک | طراحی کاربردی بپردازیم:
دانلود نمونه پروپوزال مهندسی مکانیک بر اساس مقالات جدید در سال 2023
در این بخش به ارائه ی دانلود نمونه پروپوزال مهندسی مکانیک در رشته ها و گرایش های مختلف پرداخته می شود. با استفاده از دانلود نمونه پروپوزال مهندسی مکانیک شما می توانید تحقیق خود را کامل کرده و همچنین نحوه ی نگارش پروپوزال را به صورت دقیق یاد بگیرید. نمونه
دانلود پروپوزال مهندسی مکانیک گرایش سیالات
دانلود نمونه پروپوزال مهندسی مکانیک گرایش طراحی کاربردی
دانلود پروپوزال مکاترونیک
دانلود نمونه پروپوزال مهندسی مکانیک گرایش ساخت و تولید
لازم به ذکر است نمونه پروپوزال های مهندسی مکانیک قرار گرفته، تماما، پروپوزال های آموزش انجام شده توسط دپارتمان پژوهشی سفیر بوده و به منظور کمک به سایر دانشجویان در سایت قرار گرفته است.
در این بخش موضوعات مهندسی مکانیک برای گرایش تبدیل انرژی ا ارائه می شود.
طراحی سیستم تشخیص نفوذ هوشمند با استفاده از منطق فازی و بر پایه الگوریتم بهینه سازی ازدحام ذرات
شبیهسازی رسوب آسفالتین در مبدلهای نفت خام
تحلیل ورق به کمک المان کوادراتور دیفرانسیلی مثلثی
تحلیل تلفات حرارتی موتور به وسیله مقایسه دریچه گاز مکانیکی و برقی و تاثیر آن بر مصرف سوخت
بررسی پارامتری اثر زاویه ی حمله برای شبیه سازی آیرودینامیکی پدیده ی استال مودال در جریان اطراف بال هواپیما
بررسی سیستم روغنکاری و رینگ های پیستون موتورهای دیزلی و بهینه سازی آن برای کاهش آلاینده ذرات معلق
پشبیه سازی عملکرد پمپ حرارتی جذبی زمین گرمایی به کمک خورشید
مدلسازی انتقال حرارت و انتقال جرم جهت خشک کردن شلتوک برنج در یک بستر سیال غیر ثابت
بررسی عددی بارگذاری تنش حرارتی در مخازن استوانه ای به روش المان محدود
آنالیز و طراحی الاستیک کپسولهای گاز طبیعی با فشار بالا CNG از جنس کامپوزیت
طراحی و ساخت قالب تزریق موم پره توربین با استفاده از تکنیکهای نمونهسازی و ابزارسازی سریع
بررسی تحلیلی و تجربی چگونگی شکلدهی قطعه عدسی شکل از آلیاژ Ti-6Al-4V
تحلیل عددی پدیده احتراق مخلوط گازهای قابل احتراق در موتورهای احتراق داخلی رفت و برگشتی
طراحی، بهینهسازی و ساخت قالب پروفیل اکستروژن پلاستیک با مقطع I شکل
ارتعاشات و قابلیت اتکاء تیرچرخان تیموشنکو با عدم قطعیت در خواص، تحت ورودی تصادفی
تعیین تاثیر پارامترهای موثر بر شکل دهی ورقهای بدنه کشتی بروش گرمایش خطی برای تدوین سیستم برنامهریزی فرآیند بکمک رایانه
طراحی و ساخت یک دستگاه تغذیه کاغذ الکترواستاتیکی
تحلیل عددی و تجربی فرآیند شکلدهی مجدد لولههای با مقطع مربعی و مستطیلی به کمک رایانه
شبیهسازی دینامیکی و طراحی سیستم کنترل مدرن در گاورنر موتورهای دیزل
مدلسازی و بررسی انتقال حرارت در بسترهای آکنده.
طراحی قالبهای (غلتکهای) فرایند شکل دهی غلتکی سرد لوله به کمک کامپیوتر
طراحی و آنالیز تنش مقاطع مخروطی ناقص از جنس ایزوترپ و ارتوترپ
بررسی تئوریهای نفوذ پرتابه در اهداف فلزی و اصلاح یکی از تئوریهای مربوطه
بررسی نفوذ گلوله دراهداف فلزی
حل عددی معادلات میدان جریان در قسمت انتهای بدنه راکت (Plume).
انتقال حرارت دوفازی در کوره دیگ بخار صنعتی
تحلیل دینامیکی و طراحی دودکشهای فلزی خودایستا rDynamical Analysis & design of self- supported steel stacks
شبیهسازی دینامیک پرواز موشکهای سوخت جامد
طراحی بهینه آئروترمودینامیکی توربینهای گاز محوری
موضوعات تحقیق گرایش جامدات:
در این بخش موضوعات تحقیق مهندسی مکانیک برای گرایش جامدات ا ارائه می شود.
ارتعاشات آزاد پوستههای دوار (تعیین فرکانسها و شکل مودهای طبیعی پوسته متقارن دوار)
طراحی آئرودینامیکی تونل باد مافوق صوت متناوب دمشی.
طراحی سیستم کنترلی دیگ بخار نیروگاه حرارتی
طراحی و مدلسازی مدار باز نیروگاه حرارتی
طراحی شبکه هوای فشرده و نازل تونل باد مافوق صوت باماخ متغیر
تحلیل استاتیکی و دینامیکی میکروبیم نانوتیوب کربنی
تحلیل دینامیکی یاتاقان مغناطیسی و ساخت یک نمونه آزمایشگاهی
تحلیل، طراحی و ساخت ترانسدیوسرآلتراسونیک پرقدرت و مستقل از بار
مطالعه نقش پارامترهای سینتیک شیمیایی در ناپایداری دتونیشنهای گازی
شبیهسازی عددی سه بعدی جریان و احتراق در محفظه سه بعدی
طراحی و تحلیل موتور خطی DC و ساخت یک نمونه اولیه
بررسی رشد ترک در حوزه تنشهای مکانیکی حرارتی
مطالعه عددی و تجربی فرآیند شکست در پوستههای سرامیکی مورد استفاده در ریختهگری دقیق با مدلهای استریولیتوگرافی
بررسی تجربی اثر پارامترهای فرآیندی درتزریق پلاستیک به کمک آب
تاثیر مدلهای هیدرودینامیکی و سینتیکی بر تبخیر یک قطره در یک محیط گازی
شبیهسازی سه بعدی موتور EF-7 و بررسی تاثیر پارامترهای احتراق بر عملکرد موتور و میزان آلایندهها
بررسی دو بعدی تلاطم سیال لزج در مخزن دوفازی تحت ارتعاشات عرضی تصادفی
تحلیل عددی جریان سیال و مدیریت آب در پیلسوختی از نوع غشای تبادل پروتون
طراحی کنترلر عصبی-فازی نشست خودکار هواپیماهای مسافربری
تحلیل عددی جریان داخل سیلندر در موتورهای احتراق داخلی با استفاده از مدل توربولانسی – RSM
تعیین ضریب الاستیسیته دیواره شریان با استفاده از مدلسازی شریان و جریان خون
طراحی، ساخت و اتوماسیون سیستم موقعیت و سمت دهی آنتن رادار
سرمایش طبیعی بااستفادهاز کانال زیرزمینی هوا
طراحی قالبهای آهنگری اجسام دوار بکمک کامپیوتر
محاسبه ضریب انتقال حرارت جابجائی در روش خنک کاری قشری با مایع
طراحی قالبهای آهنگری قطعات نامتقارن محوری برای تهیه نمودار گردشی نرمافزار کامپیوتری
حل جریان سیال لزج به وسیله روش المانهای مرزی (BEM)
طراحی پارامتریک و طراحی و ساخت قالبهای فورج دقیق چرخدنده هرزگرد پژو ??? با استفاده از تکنولوژی CAD/CAM
دینامیک پرواز موشک هدایت شونده
تدوین فرآیند جوشکاری انفجاری لولههای دو جداره فولاد و آلیاژ برنز
تحلیل ارتعاشات غیرخطی و پایداری صفحات مستطیل شکل ویسکوالاستیک
مدلسازی و تحلیل دینامیکی خروج از خط بوژی باری سهتکه هنگام عبور از قوس
آنالیز، طراحی و بهینهسازی ابعادی اجزای بال هواپیما
تحلیل عددی ناپایداری آیروالاستیک غیرخطی بال تابدار با دو درجه آزادی
طراحی لوح اولیه برای قطعات غیر مدور با استفاده از میدان خطوط لغزش
شبیهسازی رشد ترک در مخازن تحت فشار تحت بار دینامیکی
طراحی و ساخت یاتاقان مغناطیسی در سرعت پایین
تحلیل تبادل تشعشعی برای مواد متخلخل رشتهای (RPC) در دمای بالا
طراحی و ساخت مکانیزم موقعیتدهی دقیق به روش ضربه پیوسته
طراحی و ساخت سنسور مغناطیسی سه محوره برای تشخیص فلزات متحرک در زیر دریا
آنالیز الاستیک پلاستیک پوستههای استوانهای با گشودگیهای مختلف
آشکارسازی جریان مذاب در فرآیند قالبگیری تزریق پلاستیک به روش مشاهده مستقیم
شکلدهی ورقهای سلولزی با قالب پرس گرم و بررسی پارامترهای موثر بر فرآیند
بررسی رفتار دینامیکی میل لنگ موتور خودروی سمند تحت اثر دمپر ارتعاشات پیچشی
بررسی ناپایداری کلوین – هلمهولتز در لولههای شیبدار با در نظر گرفتن تنشهای برشی
تاثیر حرکت دورانی روی ارتعاش تیر متحرک در راستای محور طولی
تحلیل فرآیند نفوذ پرتابههای تخت تغییر شکلپذیر در اهداف فرزی چند لایه
طراحی و ساخت قالب فورج دقیق برای قطعه گردویی پلوس خودرو با استفاده از تکنولوژی CAD/CAM
بررسی اثرات ارتعاشی پارامترهای ماشینکاری آلیاژ تیتانیوم Ti-6AL – ۴V
مدلسازی نفوذ گلوله در پارچهها و مقایسه با نتایج تجربی
تولید قطعات تزریقی از کامپوزیت چوب پلاستیک با درصد بالای چوب
مدلسازی و تحلیل عددی مشعل متخلخل استوانهای
طراحی سیستم خودکار عیبیابی ارتعاشی بلبرینگها با استفاده از هوش محاسباتی
مدلسازی و کنترل رفتار ترموهیدرولیکی رآکتور قدرت از نوع AG
طراحی و ساخت سیستم اندازهگیری PVT کامپوزیتهای چوب – پلاستیک
طراحی و ساخت قالبهای آهنگری مدولار برای قطعات دوار
شبیهسازی مسیر رشد ترک در لولههای جدار نازک تحت بارگذاری دینامیکی
شبیهسازی دو بعدی دتونیشن گازی به منظور بدستآوردن تاثیر امواج عرضی در انتشار آن
بهینهسازی عملکرد سیستمهای سرمایش تابشی سقفی با تحلیل همزمان مصرف انرژی و آسایش حرارتی
تحلیل جریان تقارن محوری داخل سیلندر در طی فرایند تراکم و تزریق سوخت با استفاده از مدل توربولانسی تنشهای رینولدز(RSM)
هواشناسی عددی بر مبنای پارامترهای محلی جو
شبیهسازی عددی پدیده خوردگی سطح خارجی لوله در اثر جریان دو فازی گاز – ذره جامد
طراحی و ساخت بالانسر دینامیکی اتوماتیک یک صفحهای
استفاده از اولتراسونیک پینینگ برای افزایش استحکام خستگی و عمرسازههای جوشی
طراحی و ساخت یک نمونه آزمایشگاهی پاک کننده التراسونیک و بررسی تاثیر پارامترهای مختلف
طراحی و مدلسازی سازه ماشین الکتروشیمیائی (ECM)
آنالیز تنش و مقاومت ورقهای FGM
موضوعات برای سایر گرایش ها:
استفاده از الگوریتم ژنتیک برای یافتن شکل بهینه پرههای نازک خنک ساز
بررسی جریان مغشوش و پدیده انتقال به روش شبیهسازی گردابههای بزرگ LES
مدلسازی ترک دو بعدی الاستوپلاستیک با استفاده از المان محدود توسعه یافته
تحلیل تئوری و تجربی شکل لبه ورق در فرآیند شکلدهی غلتکی سرد لوله
عیبیابی جعبه دنده از طریق آنالیز ارتعاشی از دو روش دمدولاسیون رزونانسی و آنالیز طیف لحظهای توان
بررسی تئوریک جوشکاری انفجاری لولههای دو جداره فلزی
بررسی عددی استفاده از ماتریس متخلخل [صحیح: ماده متخلخل] درون یک لوله جهت بهبود نرخ انتقال حرارت
مدلسازی ارتعاشات کوپل شده پیچشی و خمشی رشتههای حفاری و حل عددی آن
افزایش راندمان موتور XU7 با استفاده از سیستم پرخوران و اصلاح پارامترهای عملکردی
تخمین زاویه خمش ورق در فرآیند شکلدهی خمشی با لیزر با استفاده از شبکههای عصبی
مطالعه و طراحی دست سیبرنتیکی (استفاده از تکنیک حس عمقی توسعه یافته در کنترل دست سیبرنتیکی تهران)
طراحی شیر تنظیم فشار گاز
اصول مقدماتی طراحی موشک (V2)
طراحی مخازن سوخت در موشکهای سوخت مایع تحت بارگذاری متقارن
مدلسازی تبخیر قطره در سرمایش هوای ورودی به کمپرسور توربین گازی
طراحی، بهینهسازی و ساخت پالتهای از جنس کامپوزیت چوب – پلاستیک
بهینهسازی و بررسی عملکرد یک نمونه آبگرمکن خورشیدی به روشهای تجربی و تحلیلی
طراحی و ساخت موتور الکترواستاتیکی دورانی
کاهش آلایندگی و مصرف سوخت موتور احتراق داخلی با تاکید بر مخلوط رقیق
مطالعه عددی و تجربی اثر قیود قالب در ابعاد نهایی قطعات تزریقی
کاویتاسیون در نازل انژکتور دیزل
شبیهسازی عددی عملکرد سیستم سرمایشی دیسکنت در شرایط آب و هوایی مختلف
تحلیل دینامیک و ارتعاشات میز ماشین ابزار بر پایه مکانیزم استوارت
شبیهسازی رفتار برج خنک کنتر با جریان مخالف در شرایط مختلف آب و هوایی ایران
مدلسازی فرایند فرزکاری و بهینهسازی جهتگیری ابزار و انتخاب ابزر مناسب در ماشین کاری پره توربین از جنس Ti-۶AL-۴V
استفاده از جابجایی القایی در داخل سقف تابشی سرمایشی به منظور بهبود عملکرد آن
مدلسازی و شبیهسازی عددی یک سیستم سرمایش تشعشعی همراه با سقف هیدرونیک برای یک ساختمان نمونه در تهران
تحلیل و بررسی تاثیر منفی وزش باد بر عملکرد برجهای خنک کن خشک نیروگاهی و ارائه راهحل
طراحی و ساخت یک مکانیزم هپتیکی شش درجه آزادی
تحلیل عددی ناپایداری کلوین – هلمهلتز در جریان دو فازی افقی لایهای با درنظرگرفتن اثر لزجت
تحلیل پایداری و نگهداری ستون سنگی مغار سد سیاه بیشه
طراحی و شبیهسازی یک ربات چند تکه درون لوله با توانایی عبور از خمها و لولههای عمودی
بررسی تحلیلی ،عددی و تجربی فرایند شکل دهی لوله های دو جداره به روش هیدروفرمینگ
تحلیل حرارتی سه بعدی شیشه های چند جداره
تعیین و آزمایش فضای کاری و نقاط تکین ماشین هگزاپاد
بررسی مدل بهینه پاشش در موتور EF-7 به منظور کاهش مصرف سوخت و آلایندگی
بررسی تئوری و تجربی اثر شرایط کاری در فرآیند کشش عمیق هیدرومکانیکی
شبیهسازی عددی میکسر موتور با سوخت CNG و بهینهسازی آن
طراحی مراحل شکل دهی و مدل سازی فیزیکی مرحله نهایی فورج قطعه کلگی بیرونی پلوس
تحلیل دینامیکی تیزی پروفیل چرخ براثر سایش در وقوع خروج از خط
مطالعه تحلیلی و تجربی فرآیند شکلدهی مجدد لولههای مربعی با در نظر گرفتن اثر اصطکاک
شبیهسازی عددی جریانگذرای احتراقی اطراف استوانه به روش گردابه تصادفی
تحلیل دینامیکی بوژی ZK3 هنگام عبور از مسیر قوسی شکل
مدلسازی و شبیهسازی فرآیند نفوذ گلوله در اهداف کامپوزیتی
مدیریت آب در پیل سوختی پلیمری
تحلیل استوانههای جدار ضخیم با ضخامت متغیر تحت فشار استاتیکی و دینامیکی و تعیین توزیع فشار از پاسخ
آنالیز و طراحی مخازن زیرزمینی گاز
استانداردها و روش های تست شیشه ترمز ویژگیها و روش آزمون
منظور از استاندارد در این تحقیق، استاندارد درباره شیشه های ایمنی و مواد شیشه ها و اتصالات آنها است که در نظر است به عنوان شیشه جلو یا سایر شیشه ها یا به عنوان پانل های جداکننده روی خودروهای موتوری و تریلرهای آن نصب شود .
شیشه مورد استفاده در وسایل روشنایی و علامت دهنده نوری , داشبرد , شیشه ویژه محافظت در برابر تهاجم , همچنین شیشه نشکن و شیشه های جلو خودروهای مورد استفاده در محیط های حاد و با حداکثر سرعت ۴۰ کیلومتر بر ساعت استثناء هستند .
بررسی استانداردهای شیشه و ترمز مستلزم دانش فنی مورد نظر میباشد معهذا در این فصل به روشهای تست و استانداردهای قطعات مذکور می پردازیم که از جمله میتوان به تست های اصطکاک و نور و سایش و فشار اشاره کرد .
دلایل عمده این تست ها با لا بردن ضریب ایمنی خودروها میباشد استاندارد ترمز نیز از موارد ضروری و اجباری مربوط به خودرو میباشد از جمله سیستمهای ترمز میتوان به ترمز ضد قفل اشاره نمود
نخست به تعریف اصطلاحات می پردازیم.
جام شیشه نشکن
عبارت است از یک جام شیشه ای، از یک لایه منفرد شیشه که تحت عملیات بخصوصی به منظور افزایش مقاومت مکانیکی و کاهش خطرات ناشی از خرد شدن آن در اثر ضربه , قرار می گیرد .
جام شیشه لایه ای
عبارت است از یک جام شیشه ای شامل دو یا چند لایه از شیشه که توسط یک یا چند ورق میان لایه۱ از مواد پلاستیکی که بین آنها قرار میگیرد، به یکدیگر محکم و متصل می شوند. انواع شیشه های لایه ای بصورت ذیل میباشند :
معمولی
هنگامیکه هیچ یک از ورقهای شیشهای مورد استفاده تحت عملیات خاصی قرار نگرفته باشند.
عملیاتی شده
هنگامیکه حداقل یکی از ورقهای شیشهای مورد استفاده تحت عملیات بخصوصی قرار گرفته باشد که به منظور افزایش مقاومت مکانیکی و کاهش خطرات ناشی از خرد شدن شیشه در اثر ضربه انجام میگیرد.
شیشه های ایمنی با پوشش پلاستیکی
عبارت است از شیشه های معرفی شده در بندهای ۳-۱ یا ۳-۲ که دارای پوششی از مواد پلاستیکی بر روی سطح داخلی خود می باشند.
جام شیشه پلاستیکی – شیشه ای
شیشه های لایه ای که دارای یک ورق از شیشه و یک یا چند ورق از پلاستیک که روی همدیگر قرار گرفتهاند و حداقل یکی از آنها به صورت میان لایه بین ورق ها عمل می کند ، بشکلی که وقتی شیشه روی وسیله نقلیه قرار میگیرد، ورق(ورقهای) پلاستیکی روی سطح داخلی واقع شود (شوند).
گروه شیشه های جلو
عبارت است از گروهی مشتمل از شیشه های جلو که دارای اشکال و ابعاد مختلف میباشند لیکن برای تعیین خواص مکانیکی، ویژگی های خردشدن و رفتار آنها در طول آزمون ها به منظور تعیین مقاومت آنها درمقابل آسیبهای محیطی تحت یک سری آزمونهای مشترک قرار میگیرند.
شیشه جلوی مسطح
عبارت است از شیشه جلویی که در هیچیک از نقاط سطح آن , دارای شعاع انحناء نامی به اندازه ای که منجر به ارتفاع قطاعی۱ بیش از۱۰ میلیمتر بر متر خطی گردد , نمی باشد.
شیشه جلوی انحناء دار
عبارت است شیشه جلویی که دارای شعاع انحناء نامی به اندازه ای که منجر به ارتفاع قطاعی بیش از ۱۰ میلیمتر بر متر خطی گردد , میباشد.
پنجره دو جداره
عبارتست از پنجره ای که از دو شیشه کاملا” مجزا تشکیل شده که روی یک قاب مشترک بر روی خودرو نصب شده.
– شیشه دو جداره
عبارت است از دو ورق شیشه که توسط یک جدا کننده به یک فاصله یکنواخت از همدیگر قرار گرفته و در کارخانه سازنده شیشه بطور ثابت و دائم سوار شده اند .
شیشه دو جداره متقارن
عبارت است از شیشه های دو جداره ای که در آن دو شیشه تشکیل دهنده از یک نوع بوده ( نشکن ، چندین لایه و …) و دارای خصوصیات اصلی و فرعی یکسانی می باشند.
شیشه دو جداره غیر متقارن
عبارت است از شیشه های دوجداره ای که در آن دو شیشه تشکیل دهنده آن از دو نوع مختلف بوده(نشکن، چندین لایه و …)یا دارای خصوصیات اصلی و/ یا فرعی متفاوتی می باشند.
عبارت است از طلقی پلاستیکی غالبا” از جنس پلی وینیل بوتیرال که باعث چسبندگی لایه ها در جام شیشه های لایه ای به همدیگر و ایجاد خواص ایمنی در آن می گردد .
روش های تست شیشه ترمز
مشخصات اصلی
عبارت است از نام تجاری یا علامت سازنده و مشخصاتی که به طور قابل توجهی خصوصیات مکانیکی و/یا نوری جام شیشه را نسبت به عملکردی که شیشه باید روی خودرو انجام دهد تغییر می دهند.
مشخصات فرعی
عبارت است از مشخصاتی که باید تقریباً خصوصیات نوری و/یا مکانیکی یک واحد از شیشه را بگونه ای تغییر دهد که برای عملکرد مورد نظر روی خودرو اهمیت دارد. وقتی میزان تغییربرآورد میشود، مقدار اشکال ایجاد شده باید به حساب آورده شود.
شاخص های دشواری
عبارت است از دسته بندی دو درجه ای که برای نشان دادن میزان تاثیرات روی عملکرد , در نتیجه تغییر در مشخصه فرعی کاربرد دارد. گذر از شاخص ۱ به شاخص ۲ نشان دهنده نیاز به انجام آزمونهای اضافی روی شیشه با مشخصه تغییر یافته است .
سطح گسترده شیشه جلو
عبارت است از کوچکترین مساحت مستطیلی از شیشه که شیشه جلو میتواند از آن ساخته شود.
زاویه شیب شیشه جلو
عبارت است از زاویهء بین خط عمودی و خط مستقیمی که لبه های بالا و پایین شیشه جلو را به هم متصل میکند، و این خطوط مستقیم در صفحه فرضی قائم طولی میانی خودرو قرار دارند.
– زاویه شیب از روی خودرو و مستقر برسطح زمین زمانی اندازهگیری میشود که خودرو برای حمل مسافر استفاده شده و باک پر از سوخت بوده و همچنین حاوی مایع خنک کن, روغن و همراه با ابزارها و چرخهای یدکی در محل خودشان بوده و در حال حرکت باشد .(اگر موارد نامبرده به عنوان بخشی از تجهیزات استاندارد توسط کارخانه سازنده وسیله نقلیه در نظر گرفته شده است)
همچنین باید وزن راننده و وزن هر شخص را ۱±۷۵ کیلوگرم در نظر گرفت (در صورتیکه وسیله نقلیه برای جا بجائی سرنشینان اضافی در نظر گرفته شود، وزن سرنشینان صندلی جلو نیز به حساب می آید).
فهرست مطالب روش های تست شیشه ترمز
فصل اول: اصطلاحات و تعاریف
فصل دوم
شرایط عمومی آزمون
شیشه جلو چند لایه معمولی
شیشه های جلو چند لایه عملیاتی شده
شیشههای جلو، از جنس پلاستیکی – شیشه ای
گروهبندی شیشه های جلو برای آزمونهای تایید نوع قطعه
روشی که برای تعیین مناطق آزمون روی شیشههای جلوی وسایل نقلیه گروه M1 در ارتباط با نقاط’V΄ دنبال می شود
شیشه هایی که بطور یکنواخت نشکن شدهاند
شیشه چند لایه به غیر از شیشههای جلو
شیشه های پلاستیکی به غیر از شیشههای جلو
شیشه ایمنی با پوشش پلاستیکی (روی سطح داخلی)
شیشه دو جداره
اندازه گیری ارتفاعهای قطاع و موقعیت نقاط برخورد
فرم مربوط به تایید نوع قطعه یا تمدید یا رد یا ابطال تایید نوع قطعه یا ایستگاه نهایی تولید یک نوع شیشه ایمنی
فصل سوم: الزامات مربوط به نصب شیشههای جلو و شیشههایی به غیر از شیشههای جلو خودروها
استاندارد و روش های تست ترمز
هدف
دامنه کاربرد
فصل چهارم: اصطلاحات و تعاریف, الزامات ساختاری و نصب و تمهیدات تایید نوع
اصطلاحات
الزامات ساختاری و نصب
تقاضا برای تایید نوع
تغییر نوع و تمدید تایید نوع
تطابق محصول
فصل پنجم: آزمونهای ترمز و عملکرد سیستم ترمز
آزمونهای ترمز
عملکرد سیستم های ترمز
فصل ششم (روش اندازه گیری زمان عکس العمل برای وسایط نقلیه با سیستم ترمز هوای فشرده)
الزامات کلی
وسایط نقلیه موتوری
تریلرها(شامل نیمه تریلرها)
اتصالات آزمون فشار
فصل هفتم (مخازن و منابع انرژی)
سیستمهای ترمز هوای فشرده
سیستمهای ترمزگیری خلاء
سیستمهای ترمزگیری هیدرولیکی با انرژی ذخیره شده
فصل هشتم (ترمزهای فنری)
اصطلاحات و تعاریف
الزامات کلی
سیستم رها سازی
فصل نهم (مواردی که آزمونهای نوع I و/ یا II ( یا IIA) یا III بر وسیله نقلیه ارائه شده برای تائید اجباری نیست.
روشهای جایگزین برای آزمونهای نوع I و نوع III برای ترمزهای تریلر
گزارش آزمون نمونه محور مرجع
فصل یازدهم(شرایط حاکم بر آزمون وسایط نقلیه با سیستم های ترمز اینرسی)
علائم و تعاریف
تمهیدات عمومی
الزامات کلی
الزامات وسایل کنترل
آزمونها و اندازه گیری هایی که باید روی سیستم کنترل انجام شود
الزامات ترمزها
فصل دوازدهم (مستند سازی تائید نوع)
فصل سیزدهم(الزامات آزمون برای وسایط نقلیه با سیستمهای ترمز ضد قفل)
فصل چهارده (شرایط آزمون برای تریلرهای با سیستم ترمز الکتریکی)
کلیات
شرایط مربوط به تریلر
عملکرد
فصل پانزده(روش آزمون دینامومتر اینرسی برای لنتهای ترمز)
کلیات
تجهیزات آزمون
شرایط آزمون
روش
بازدید لنت های ترمز
فصل شانزده(آزمون ترمز و انحراف برای وسایط نقلیه با استفاده موقت از چرخها/ تایرهای یدکی)
شرایط کلی
آزمون ترمزگیری و انحراف
فصل هفده(روش جایگزین برای آزمون سیستم ترمز ضد قفل(ABS) تریلر)
کلیات
مدرک اطلاعاتی
تعریف وسیله (های) نقلیه آزمون
برنامه آزمون
گزارش تایید
فصل هجده(تائید نوع مجموعههای لنت ترمز تعویضی به عنوان یک مجموعه فنی مجزا)
دامنه کاربرد
اصطلاحات و تعاریف
تقاضا برای تائید نوع
صدور گواهی نامه تائید نوع
ویژگیها و آزمون ها
بسته بندی و علامت گذاری
تغییر نوع و تمدید تایید نوع
تطابق تولید
فصل نوزده (فرم گواهینامه تایید نوع)
فصل بیست(مدرک اطلاعاتی شماره …در رابطه با تأیید نوع مجموعه های لنتهای ترمز )
فصل بیست و یک (مدرک اطلاعاتی شماره … در رابطه با تأیید نوع یک خودرو با توجه به تجهیزات ترمز وسایط نقلیه
فصل بیست و دو (مدرک اطلاعاتی شماره …در رابطه با تأیید نوع تجهیزات ترمز تریلر به غیر از ترمزهای اینرسی (با حرکت اضافی)
بررسی و تحلیل روشهای تعیین نقاط تکین و طراحی ایزوتروپی در رباتها
هدف از طراحی رباتها انجام کار بخصوص و یا کنترل هدفمند یک فرآیند میباشد. در صنایع خودروسازی رباتها به صورت خودکار فرآیندهای جوشکاری، جابجایی، مونتاژ و غیره را به عهده میگیرند.
در ماشین ابزارها برای حرکت ابزار یا قطعه در مسیر و شکل خاص مورد استفاده قرار میگیرند. در اتوماسیون فرایندهای تولید از رباتها استفاده میکنند. رباتهای اولیه اکثرا از نوع رباتهای سری بوده اند. اما احساس نیاز به سفتی بیشتر، قابلیت سرعت و شتاب بیشتر و دقت بالا مقدمهای بر طراحی رباتهای موازی شد.
زمانی که ربات موازی شش درجه آزادی استیوارت به عنوان شبیه ساز پرواز بکار گرفته شد. اما مصارف عملی رباتها در صنایع، نیاز به همه شش درجه آزادی نداشت لذا رباتهای موازی با درجه آزادی کمتر از شش طراحی و پیشنهاد شدند.
این رباتها در مقایسه با نوع شش درجه آزادی کنترل آسانتر، فضای کاری بیشتری دارند. بعد از آن رباتهای سه درجه آزادی که توانایی حرکت صرفا انتقالی و یا صرفا چرخشی داشتند به دلیل استفاده خاص در صنایع مورد توجه زیادی واقع شدند.
با گسترش استفاده و طراحی انواع رباتهای متنوع، مسائل طراحی نیز به تدریج شکل گرفته و پیشرفت کردند و ایدههای نو وارد حوزه طراحی شد و انواع تئوریهای مختلف برای مورد خاصی از طراحی ارائه گردید.
از جمله مسائلی که در طراحی مورد توجه است کنترل پذیری ربات در فضای کاری آن میباشد. لذا یافتن نقاط و یا فضایی که ربات در آن منطقه قابل کنترل نیست را باید از اولویتهای اصلی در طراحی ربات دانست. برای این منظور طراحی مکانیزم حرکت اسپیندل در صفحه مورد مطالعه قرار میگیرد. به علت اینکه این حرکت باید خیلی دقیق باشد از اصول طراحی ایزوتروپی استفاده میشود.
در این تحقیق ربات از منظر مکانیکی بررسی شده است. در فصل اول به معرفی، تارخچه و طبقه بندی رباتها و مقایسه رباتهای موازی با رباتهای سری میپردازیم. در فصل دوم سینماتیک ربات در دو قسمت مستقیم و معکوس مورد بررسی قرار میگیرد.
در فصل سوم به بررسی و تحلیل نقاط تکین ربات بحث می-شود. در واقع به یافتن موقعیتهایی که ربات قابل کنترل نیست، میپردازیم. در پایان این فصل نقاط تکین ربات۳-UPU را توسط سه روش تئوری پیچواره، آنالیز استاتیکی و ماتریس ژاکوبی مورد بررسی قرار داده است.
در فصل چهارم درباره طراحی ایزوتروپی رباتهای صفحهای سری و موازی بحث میشود. برای این منظور طراحی مکانیزم حرکت اسپیندل در صفحه مورد مطالعه قرار میگیرد. به علت اینکه این حرکت باید خیلی دقیق باشد از اصول طراحی ایزوتروپی استفاده میشود. این طراحی بر شرایط ماتریسهای ژاکوبی که سرعت محرکها را به سرعت مجری نهایی مرتبط میسازد، استوار خواهد بود.
طراحی توربوشارژ خودروی CNG: یک توربو شارژر از دو قسمت اصلی تشکیل شده است ” توربین و کمپرسور. در موتور هایی که توربوشارژ نصب گردیده ، پس از اینکه مخلوط سوخت و هوا در داخل سیلندر متراکم شد توسط جرقه شمع محترق شده ، و این احتراق باعث آزاد شدن انرژی حاصل از سوختن مخلوط گاز می گردد،حال این گاز (دود منیفولد) پس از گذراندن این سیکل، باید سیلندر را ترک کند که این گاز خروجی فشاری حداقل معادل ۳۰ اتمسفر را دارد یعنی ۳۰ برابر فشار داخل سیلندر . این گاز حاوی مقدار قابل توجهی ازانرژی است که می توان از این انرژی بصورت مفید استفاده کرد ولی در موتور هایی که تنفس بصورت عادی [ بدون توربوشارژ ] است گاز خروجی و انرژی موجود توسط اگزوز به بیرون رانده می شود که این عمل برابر است با اتلاف مقدار زیادی از انرژِی کنترل نشده !
یک توربوشارژر به طور عمده قدرت موتور را بدون افزایش وزن آن زیاد می کند که مزیت بزر گی است و توربوشارژرها را مهم می کند.استفاده از توربوشارژرها یکی از مؤثرترین راه های افزایش بازده در موتورهای توربین گازی می باشد. به منظور درک صحیح از نحوه عملکرد توربوشارژرها می بایستی ابتدا طرز کار موتور اتومبیل های مدرن را بررسی کنیم. این موتورها با نام مرسوم چهار زمانه شناخته شده و در هر چرخه کاری ، پیستون چهار مرحله را طی می کند. زمانی که پیستون پائین می آید ، در یک لحظه هوا از طریق دریچه ای به داخل سیلندر وارد می شوند و وقتی که پیستون برمی گردد ، دریچه ها (سوپاپ) بسته شده و هوای درون محفظه احتراق با بالا آمدن پیستون متراکم می گردد. زمانی که پیستون به بالای سیلندر می رسد ، با جرقه ی شمع، مخلوط هوا و سوخت مشتعل می شود.
اصول کار توربو
اصول کار توربو بر اساس تغذیه بیشتر هوا به موتور است. برای مثال یک موتور فورد CVH1.6که در دو مدل معمولی و توربوشارژ تولید می شود. موتور معمولی ۱۰۵ اسب نیرو دارد ولی موتور توربو فقط به واسطه نصب توربو ۱۳۵ اسب نیرو دارد . در این مورد با اضافه شدن توربو ۳۰ اسب افزایش نیرو داریم. علت اینکه افزایش نیروی بیشتری نداریم این است که سطح فشرده سازی مورد استفاده کم است.در یک موتور که به طور معمولی با فشار جو تغذیه می گردد فشار جو هوا را به میزان ۱۴٫۷ پوند بر اینچ مکعب (۱bar ) به درون موتور می راند. به طور خلاصه اگر یک موتور در فشار ۱ اتمسفر ۱۰۰ اسب نیرو داشته باشد با دو برار شدن فشار(۱بار فشرده سازی در توربو) نیروی آن دو برار می شود. زیرا با این کار دو برابر هوا در سیلندر خواهیم داشت و می توانیم دو برابر سوخت بسوزانیم .البته کارها به این سادگی هم نیست. با افزایش فشرده سازی بیشتر افزایش قدرت مورد توقع اتفاق نمی افتد زیرا در فشار بالاتر نیاز به سوخت غنی تر است و باید میزان تراکم موتور را کاهش داد و موارد دیگر…
طراحی توربوشارژ خودروی CNG
هدف این تحقیق, بررسی میزان تولید آلاینده ها و مصرف سوخت حاصل از اتوبوس گازسوز با توجه به تاثیر توربوشارژ نصب شده, جهت تعیین بهترین توربوشار از میان توربوشارژهای انتخابی است. در این راستا، داده های حاصل از تست آزمایشگاهی از قبیل توان موتور, گشتاور موتور, مصرف سوخت و چهار محصول خروجی تست باید بررسی شده شده و بهترین توربوشارژ از میان چهار توربوشارژ تست شده انتخاب گردیده و در نهایت با توجه به درصد هوای اضافی در حالت مطلوب با مقادیر تئوری- حاصل از اصول پایه احتراق و ترمودینامیک محاسبه شده نیز ، مقایسه گردند .
دپارتمان پژوهشی سفیر متشکل از بهترین دانشجویان دانشگاه های تهران در زمینه انجام پروژه با کتیا به دانشجویان عزیز خدمات ارائه می دهد.
نر افزار کتیا نرم افزاری قدرتمند در زمینه طراحی محسوب می شود که توسط شرکت Dassault Systems در ابتدا با هدف ماشین کاری قطعات و تجهیزات مختلف روانه بازار جهانی شد و روز به روز بر قابلیت های آن افزوده شد و روند تکاملی خود را طی کرد.
کتیا نرم افزاری با قابلیت CAD/CAM/CAE است ک در بخش CAD طراحی قطعات به صورت اجسام توپر(Solid) و سطوح ( Surface) امکان پذیر است و می توان این نرم افزار را در این زمینه بی نظیرترین نرم افزار موجود دانست.
در بخش CAM با وجود این که نرم افزارهای تخصصی در زمینه ماشین کاری وجود دارند ولی کتیا توانسته با آن نرم افزارها رقابت کند به طوری که بسیاری از کاربران ترجیح می دهند G کدهای خود را با کتیا استخراج کنند.
انجام پروژه با کتیا
در بسیاری از موارد استفاده از نرم افزارهای مختلف جهت ماشین کاری سبب اتلاف وقت عوامل طراحی و تولید در تطابق فایل ها با یکدیگر در نرم افزارهای گوناگون و حتی از دست رفتن برخی از اطلاعات طراحی در جابجایی از یک نرم افزار به نرم افزار دیگر شده است. ضمن این که نرم افزار کتیا همه ی محیط های لازم جهت طراحی قطعه موردنظر نظیر ( Part Design – Assembly Design –Drafting Generative Shape Design – Wireframe) و ماشین کاری آن ها با دستگاه های CNCرا داراست. اما در بخش CAE در حالی که نرم افزار کتیا دارای قابلیت های خوبی است، ولی قابل رقابت با نرم افزارهای تخصصی در زمینه تحلیل مهندسی مانند Ansysو Abaqus نمی باشد.
خدمات دپارتمان پژوهشی سفیر با نرم افزار کتیا (Catia):
انجام پروژه با کتیا
مدل سازی سه بعدی قطعات پیچیده با کتیا
طراحی و مدل سازی سطوح پیچیده آیرودینامیکی با کتیا
طراحی قالب با کتیا
طراحی پروسه ماشینکاری و استخراج جی کد های ساخت با کتیا
طراحی مکانیزم های حرکت با کتیا
طراحی سیستم ها و تجهیزات هیدرولیکی و پنوماتیکی و الکتریکی با کتیا
طراحی چیدمانی در کارخانه جات با فضای بهینه با کتیا و …
دپارتمان پژوهشی سفیر متشکل از دانشجویان ارشد و دکتری مهندسی از دانشگاه های صنعتی شریف و امیر کبیر و علم و صنعت قادر است شما مهندسان را در زمینه انجام پروژه با نرم افزار کتیا(Catia) یاری نماید.
در این بخش به نحوه ی شبیه سازی دمپر الکترومغناطیسی در نرم افزار کارسیم پرداخته می شود. به منظور شبیه سازی باید مراحل زیر را طی کنیم.
مدل سازی دمپر الکترومغناطیسی در متلب
۱- ابتدا معادلات دپر الکترومغناطیسی را متناسب با نوع خودرو بدست می اوریم.
۲- دمپر الکترومغناطیسی را در محیط متلب شبیه سازی میکنیم. نمودار نیرو بر حسب سرعت را در ولتاژهای مختلف مطابق با شکل زیر بدست می اوریم.
جهت دریافت کد شبیه سازی دمپر الکترومغناطیسی در متلب از طریق تلگرام یا تماس (۰۹۳۷۳۹۰۵۸۶۲) با ما در ارتباط باشید.
شبیه سازی دمپر الکترومغناطیسی در نرم افزار کارسیم
شبیه سازی دمپر الکترومغناطیسی در نرم افزار کارسیم
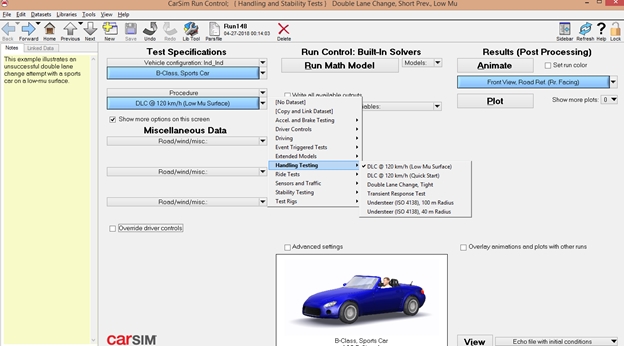
۳- دیتاهایی که در متلب بدست اورده ایم را باید در کارسیم پیاده سازی کنیم. برای این منظور ابتدا مطابق شکل زیر نوع خودرو رو انتخاب می کنیم.
۴- مشخصات مدنظر برای خودرو را انتخاب می کنیم. در این محیط هر نوع خودرویی که مدنظر باشد را می توان انتخاب کرد. پس از وارد کردن مشخصات مورد نظر خودرو نوبت به پیاده سازی دمپر الکترومغناطیسی بر روی خودرو می باشد.
۵- سیستم تعلیق و مشخص کردن نوع سیستم تعلیق را انتخاب می کنیم. توجه داشته باشید باید مطابق با شکل زیر نیرو بر حسب ولتاژ را به سیستم داده تا رفتار دمپر الکترومغناطیسی بر روی ان پیاده شود.
۶- مطابق با شکل زیر نمودار نیرو بر حسب سرعت برای یک دمپر معمولی نشان داده شده است. این نمودار را برای دمپر الکترومغناطیسی در متلب بدست اورده و بر روی سیستم پیاده سازی کنیم.
۷- روش دوم هم این است که می توان معادلات دمپر الکترومغناطیسی را به صورت کدنویسی شده بر روی کارسیم پیاده سازی کنیم. مطابق با شکل زیر.
۸- در مرحله اخر انجام انواع تست های مختلف و بررسی عملکرد دمپر الکترومغناطیسی بر روی خودرو می باشد. می توان انواع تست های مختلف را بر روی این سیستم پیاده سازی کنیم. در شکل زیر انواع تست ها برای خودروی سواری مشخص شده است که می توان انها را انتخاب کرد و خودرو را متناسب با ان تست کرد.
شبیه سازی دمپر الکترومغناطیسی در نرم افزار کارسیم
جهت هر گونه شبیه سازی و مدل سازی با استفاده از نرم افزار کارسیم با ما در ارتباط باشید.
خدمات دپارتمان پژوهشی سفیر
مشاوره جهت مدل سازی و شبیه سازی
آموزش حرفه ای و تخصصی در زمینه های مختلف بهینه سازی و پیاده سازی مقالات و مدلهای ریاضی
آموزش ارائه راه حلهای جدید و بهینه در حوزه های هوش مصنوعی .
مشاوره انجام پروپوزال کارشناسی ارشد
آموزش مدل سازی و شبیه سازی
مشاوره و آموزش مقاله نویسی، ISC، Scopus، علمی پژوهشی و isi
نگارش ومدلسازی وارائه و اکسپت مقاله در ژورنالهای معتبر داخلی و خارجی بر اساس لیست وزارت علوم
مشاوره و آموزش رایگان الگوریتم های بهینه سازی و کدنویسی
مشاوره نگارش پروپوزال
ترجمه متون مقالات و تحقیقات از انگلیسی به فارسی و فارسی به انگلیسی با بالاترین کیفیت و کمترین زمان
دانلود سمینار های کارشناسی ارشد
مشاوره و آموزش رایگان رساله نویسی و پروپوزال نویسی
کارگاه آموزشی پروپوزال نویسی کارشناسی ارشد
انجام پروژه های دانشجویی
کارگاه آموزشی رساله دکتری
مشاوره و آموزش رایگان مقاله نویسی
چاپ کتاب
ترجمه مقالات به انگلیسی
مشاوره و آموزش رایگان تحلیل های آماری و نرم افزارهای آماری
ر این بخش به بررسی بهینه سازی با الگوریتم بهینه سازی SPEA2 می پردازیم.
این الگوریتم شامل یک مجموعهی جمعیت و ی مجموعهی خارجی است. برنامه با جمعیت اولیه و مجموعه خارجی خالی آغاز و عملیات زیر در هر تکرار انجام میشود. جوابهای مسلط در مجموعه خالی کپی میگردد و تابع ارزیابی برای تمام جوابهای موجود به شرح زیر محاسبه میشود. شایان ذکر است هدف مینیمم کردن تابع ارزیابی است.
جوابهای داخل مجموعه خارجی:
برای هر جواب موجود در مجموعه i یک عدد S(i) €[۰,۱) تخصیص داده میشود که نماینده تابع ارزیابی آن جواب نیز هست. S(i) تعداد جوابهایی ازداخل جمعیت که توسط جواب i مغلوب میگردند (یا برابر آن هستند) بخش بر سایز جمعیت به علاوه یک است.
جوابهای داخل جمعیت:
برای جوابهای موجود در جمعیت (j) تابع ارزیابی از مجموع S(i)های موجود در مجموعهی خارجی که بر جواب j مسلط هستند به علاوه یک به دست میآید. در نهایت با توجه به مقدار تابع ارزیابی عملگرهای جفت گیری، ترکیب و جهش انجام میشود و مجموعهی جدید جایگزین قبلی میگردد.
الگوریتم بهینه سازی SPEA2
روش SPEA2 بر اساس اصلاح همین روش ابداع شده است. در این الگوریتم S(i) برای جوابهای موجود در جمعیت Pt و مجموعهی خارجی (Pt) ̅به شکل زیر محاسبه و در نهایت مقدار R(i) تعیین میشود. در رابطهی زیر علامت ≻ نشان دهندهی آن است که جواب i بر j غلبه کند.
S(i)=|{ j| j ϵ Pt + (P_t ) ̅^i ≻j}|
R(i) = ∑_(j∈P_t+(P_t ) ̅,j ≻i)▒〖S(j)〗
برای محاسبه مقدار تابع ارزیابی هر جواب، به R(i) پارامتری به نام D(i) نیز که دربرگیرندهی اطلاعات فاصله از kامین نقطه همسایه است نیز اضافه میگردد. برای این منظور فاصلهی جواب i از تمامی جوابها موجود در جمعیت و مجموعهی خارجی j محاسبه و در یک لیست به صورت افزایشی مرتب میشود. عنصر kام را با σ_i^k نشان داده میشود که k از جذر مجموع تعداد عضو جمعیت و مجموعه خارجی حاصل میشود. در نهایت D(i) به صورت زیر محاسبه میگردد.
D(i) = 1/(σ_i^k+2) (5)
در نهایت تابع ارزیابی به صورت زیر محاسبه میشود.
F(i) = R(i) + D(i) (6)
در شکل زیر فلوچارت مربوط به الگوریتم بهینه سازی spea2 نشان داده شده است.
جهت دانلود کد متلب الگوریتم بهینه سازی SPEA2 کلیک کنید.
در این سمینار به بررسی کنترل غیر خطی و مقاوم سیستم های تعلیق خودرو پرداخته می شود. استفاده از انواع کنترل کننده ها از جمله کنترل غیر خطی و کنترل مقاوم در سیستم های تعلیق خودرو می پردازیم. در ادامه به کنترل غیر خطی و انواع سیستم های غیر خطی را معرفی می کنیم. در ادامه به بررسی انواع روشهای خطی سازی سیستم های غیرخطی و روشهای طراحی کنترلر پراخته ایم. بعد از معرفی سیستم های تعلیق وچگونگی عملکرد ان و در انتها از کاربرد کنترلرغیرخطی در سیستم های تعلیق برای بهبود عملکرد راحتی سرنشین و پایداری سیستم تعلیق را مورد مطالعه قرار داده ایم.
واژههای کلیدی: سیستم های غیر خطی پایداری کنترلرغیرخطی سیستم های تعلیق راحتی سرنشین
کنترل غیر خطی در سیستم تعلیق
پیشنهادها
ما دراین بخش به ارائه پیشنهاد هایی که امکان انجام تحقیقات بیشتر برای رسیدن به عملکرد مطلوب تری نسبت به تحقیقات انجام شده در گذشته می شود می پردازیم
۱-انجام تمامی تحقیقات ارائه شده در فصل سه با مدل نصف خودرو
در روش پیشنهاد شده از این منظر دارای اهمیت می باشد که هر چه سیستم دینامیکی خود را با درجات ازادی بیشتری ارائه دهیم، به عملکرد مطلوب تری و نتایج به دست امده دقیق تر می باشد. که از بدست امدن این نتایج می توان راه حل مناسب تری برای کاهش ارتعاشات وارد بر سیستم تعلیق بدست اوریم .که منجر به بهبود راحتی سرنشین و افزایش راید و هندلینگ خودرو می شود .
۲- طراحی یک کنترلر لغزشی و استفاد از شبکه های عصبی برای بهینه سازی عملکرد کنترلر
هدف از طراحی یک کنرلر لغزشی، ایجاد مصالحه بهینه بین جابجایی بدنه خودرو و پایداری چرخ ها روی جاده است تا ضمن سـفر، هـم راحتـی سرنشینان تأمین شود و هم امکان فرمان پذیری و کنترل پذیری خودرو به نحو مطلوبی فراهم باشد. که در ان پس از معرفی مدل هـای ریاضـی قلاب آسمانی و زمینی، عملکرد کنترل کننده های مدل مبنای تکی و پیوندی مورد بررسی قرار گرفته. در ادامه جهت بهبود رفتار سیسـتم، ابتـدا چرخش بهینه سطوح لغزش و سپس استفاده از یک شبکه های عصبی مناسب برای بهینه سازی عملکرد کنترلر که باعث شود تا نتایج حاصل ازبهینه سازی ان عملکرد مطلوب تری نسبت به روشهای ارائه شده برای بهینه سازی در تحقیقات انجام شده در قبل باشد.
۳-طراحی کنترل مقاوم غیر خطی و بهینه سازی ان با استفاده از شبکه های عصبی برای سیستم های تعلیق فعال خودرو
یک کنترل مقاوم غیر خطی رفتار شتاب تایر و بدنه و همچنین برای جابه جایی های سیستم تعلیق را که خیلی سخت باشند به کار گرفته می شوند. برای جابه جایی های کوچک مانند یک سیستم خطی عمل می کند. و برای جابه جایی های زیاد مانع از جابه جایی زیاد تعلیق و چرخ می شود .در کنترل غیر خطی برای پیشرفته کردن و به روز رسانی کردن سیستم که دارای زمان انطباق دائمی را نداشته باشد یا براورد تاخیر جاده را نداشته باشد می توان با بهینه سازی ان با استفاده از شبکه های عصبی سیستم می تواند عملکرد سریعتر و مطلوب تری نسبت به روش های ارائه شده در گذشته داشته باشد.
فهرست مطالب بررسی کنترل غیر خطی و مقاوم سیستم های تعلیق خودرو
فصل ۱: ۱
۱-۱- مقدمه ۲ ۱-۲- سیستم غیر خطی ۲ ۱-۲-۱- مدل ساده ۲ ۱-۲-۲- انواع سیستم های غیر خطی ۴ ۱-۲-۲-۱- از نظر وجودی ۴ ۱-۲-۲-۲- از نظر خصوصیات ریاضی ۴ ۱-۲-۲-۳- از نظر رابطه ورودی و خروجی ۴ ۱-۲-۳- روشهای تحلیل سیستم های غیر خطی ۵ ۱-۲-۳-۱- روش تایع توصیف کننده ۵ ۱-۲-۳-۱-۱- کاربردهای توابع توصیف کننده ۵ ۱-۲-۳-۲- روش تابع لیاپانوف ۷ ۱-۲-۳-۳- روش صفحه فازی ۹ ۱-۲-۴- کنترل غیر خطی چیست ۱۰ ۱-۲-۴-۱- دلایل استفاده از کنترل کننده های غیرخطی ۱۰ ۱-۲-۵- انواع روشهای طراحی کنترل غیر خطی ۱۱ ۱-۲-۵-۱- خطی سازی پسخورد (فیدبکی) ۱۱ ۱-۲-۵-۲-کنترل تطبیقی ۱۲ ۱-۲-۵-۲-۱- چگونه می توان کنترل تطبیقی را طراحی کرد ۱۵ ۱-۲-۵-۲-۲-کنترل تطبیقی سیستم های غیر خطی ۱۶ ۱-۲-۵-۳-کنترل لغزشی ۱۶ ۱-۲-۵-۳-۱- اهداف یک کنترل لغزشی ۱۷ ۱-۲-۶- کنترل مقاوم چیست ۱۸
فصل ۲: سیستم تعلیق ۲۰
۲-۱- مقدمه ۲۱ ۲-۲- سیستم تعلیق چیست ۲۱ ۲-۲-۱- هر سیتم تعلیق دو هدف کلی دارد ۲۱ ۲-۲-۲- اصلی ترین اجزای سیستم تعلیق ۲۲ ۲-۲-۳- جرم معلق و نامعلق ۲۴ ۲-۲-۴-کمک فنر ۲۵ ۲-۲-۴-۱- اساس کار کمک فنر: ۲۵ ۲-۲-۵-ستون های نگهدارنده ۲۶ ۲-۲-۶- تایر ۲۶ ۲-۲-۷- سیستم تعلیق به منظور ایفای شش نقش زیر طراحی میشوند. ۲۶ ۲-۳- انواع سیستم های تعلیق ۲۶ ۲-۳-۱- تعلیق غیرفعال ۲۶ ۲-۳-۲- تعلیق نیمه فعال ۲۷ ۲-۳-۳-تعلیق فعال ۲۸ ۲-۴- انواع روش های کنترل در سیستم تعلیق ۲۹
فصل ۳: مروری بر منابع ۳۰
۳-۱- مقدمه ۳۱ ۳-۲- مرتب سازی تحقیقات انجام شده بر اساس روشهای کنترلی ۳۱ ۳-۲-۱- استفاد از شبکه های عصبی برای بهبود عملکرد سیستم تعلیق خودرو ۳۱ ۳-۲-۲- طراحی کنترلر با استفاده از مد لغزشی ۳۶ ۳-۲-۳- طراحی کنترلر با استفاده از روش کنترل تطبیقی ۳۹ ۳-۲-۴- طراحی کنترلر با استفاده از خطی سازی پسخورد (فیدبکی) ۴۴ ۳-۲-۵- طراحی کنترلر با استفاده از روش کنترل مقاوم ۴۸
هدف از این تحقیق تحلیل ارتعاشات آشوبناک و کنترل ارتعاشات سیستم تعلیق نیمه فعال خودرو با دمپر MR می باشد.
معادلات دیفرانسیل دمپر MR از پارامترهای غیرخطی زیادی تشکیلشده است که عامل اصلی ایجاد آشوبناک در سیستم تعلیق نیمه فعال میباشد.
این تحقیق با استفاده از معادلات غیرخطی دمپر MR که در یک سیستم واقعی معمولاً وجود دارد به بررسی پدیدهی آشوب روی سیستم تعلیق نیمه فعال پرداخته میشود.
معادلات مربوط به سیستم کامل خودرو با دمپر MR ارائه میگردد.
در سیستم تعلیق نوع پاسخها (پریودیک، شبه پریودیک و آشوبناک) و محدوده های آن عموماً تحت تأثیر فرکانس تحریک قرار دارد.
بنابراین دیاگرام دوشاخگی جابجایی-فرکانس با تغییر فرکانس تحریک رسم و موردبررسی قرار گرفت.
محدودههای آشوب با استفاده از دیاگرام دوشاخگی مشخص شدند، پسازآنکه محدودههای آشوبناک مشخص شد، برای توصیف و بررسی هر یک از پاسخها فضای فاز آنها رسم و مورد تحلیل قرار گرفت. کلمات کلیدی : تحلیل ارتعاشات آشوبناک و کنترل ارتعاشات سیستم تعلیق نیمه فعال خودرو با دمپر MR
در گام بعدی به بررسی رفتار دینامیکی سیستم تعلیق نیمه فعال همراه با دمپر MR در برابر ناهمواریهای جادهای پرداخته میشود. بهمنظور بهبود عملکرد سیستم تعلیق نیمه فعال از دو کنترلر، کنترلر سیستم و کنترلر دمپر استفاده میشود.
کنترلر سیستم به منظور محاسبه نیروی میرایی موردنظر برای پاسخ دینامیکی سیستم بر طبق کنترلر PID که ضرایب آن با استفاده از الگوریتم PSO بهینهشده و کنترلر دمپر برای محاسبه ولتاژ ورودی به دمپر MR برای بدست آوردن نیروی میرایی دمپر میباشد.
نتایج مربوط به سیستم تعلیق همراه کنترلر PID و کنترل ولتاژ دمپر MR با پاسخهای سیستم همراه با کنترلر PID که ضرایب کنترلر با استفاده از روش زیگور نیکولز بهینهشده، همچنین با سیستم غیرفعال با دمپر MR و سیستم تعلیق غیرفعال مقایسه شدهاند.
مقایسه نتایج شبیهسازیشده برتری سیستم تعلیق نیمه فعال همراه با دمپر MR کنترلشده نسبت به سایر سیستمهای تعلیق بیانشده را برای رانندگی مطمئن و راحتی سرنشین نشان میدهند.
جهت دریافت کد شبیه سازی مدل کامل خودرو با دمپر الکترومغناطیسی در متلب از طریق تلگرام یا تماس (۰۹۳۷۳۹۰۵۸۶۲) با ما در ارتباط باشید.
تحلیل ارتعاشات آشوبناک و کنترل ارتعاشات سیستم تعلیق نیمه فعال خودرو با دمپر
فهرست مطالب
تحلیل ارتعاشات آشوبناک و کنترل ارتعاشات سیستم تعلیق نیمه فعال خودرو با دمپر MR