سمینار بررسی روش های مسیریابی و کنترل ربات دوپا
117,900 تومان
| مشخصات | |||
|---|---|---|---|
| عنوان فارسی سمینار | بررسی روش های مسیریابی و کنترل ربات دوپا | ||
| عنوان انگلیسی پروپوزال | Exploring bipedal robot routing and control methods | ||
| سال نگارش | 2025-1404 | ||
| رشته | مهندسی مکانیک- مکاترونیک- کامپیوتر- برق | ||
| مناسب برای | سمینار– روش تحقیق– پایان نامه | ||
| تعداد صفحه | 75 | ||
| قالب فایل | تایپ شده در word (قابل ویرایش)
کیفیت طلایی بر اساس جدیدترین مقالات علمی روز |
||
مقدمه
از حدود صد سال پیش تلاش های زیادی برای ساخت ربات دوپا صورت گرفته است. این دسته از ربات ها به دلیل توانایی حرکتی خود، قابلیت های خاص و منحصربه فردمانند بالا رفتن از پله، حرکت در زمینه های ناهموار و کار کردن در شرایطی مثل محیط زندگی انسان را نسبت به دیگر ربات های متحرک دارا می باشد. با توجه اینکه ربات های فوق دارای جای پای مستقل برای حرکت می باشند، قابلیت حرکت آن ها در محیط ناهموار بیشتر از ربات های چرخ دار می باشد که برای حرکت نیاز به محیطی کم و پیش صاف و پیوسته دارند. در یک ربات دو پا سه حالت اصلی حرکت دینامیکی شامل قدم زدن، دویدن و پریدن قابل دستیابی است.
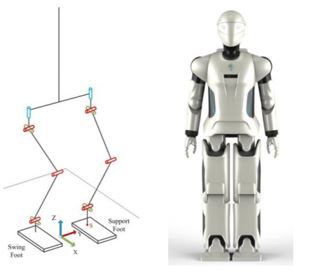
اما معمولاً اکثر ربات های دو پای موجود، فقط در یک حالت می توانند حرکت کنند و تعداد اندکی توانایی حرکت در دو حالت یا بیشتر را دارند. در حالت کلی یک سیستم حرکتی ربات دو پا شامل اعضایی می باشد که با مفاصل فعال به هم وصل شده اند. پیچیدگی سیستم بستگی به تعداد درجه آزادی و و ساختار پا ها و اندام های فوقانی دارد. طراحی ربات های دو پا توسط انسان تا حد بسیار زیادی تحت تاثیر قرار گرفته و بر گرفته از پیچیدگی و چند بعدی بودن حرکت خود انسان دوپا می باشد.

بنابراین، بسیاری از مدل ها و ماشین آلات پیشرفته شباهت زیادی به بدن انسان دارند. از سوی دیگر، حرکت راه رفتن بستگی به فاصله نسبی بین دو پا ی ربات دارد. همچنین، راه رفتن شامل دو الگو راه رفتن استاتیک و پویا در قدم زدن است. در راه رفتن استاتیک، ربات دوپا دارای پاهای بزرگ بوده و تعادلش را به وسیله قرار دادن مرکز جرمش در گستره ای که پاهایش تحمل و پشتیبانی می کنند حفظ می کند.این نوع راه رفتن معمولا آهسته است. در مقابل پیاده روی استاتیک، پیاده روی پویا یا دینامیک از قدم زدن برای حفظ تعادل و برقراری پایداریش استفاده می کند. اما کنترل کردنش سخت تر از کنترل در حالت استاتیک می باشد. الگوی قدم زدن پویا خیلی سریع تر از قدم زدن استاتیک می باشد[۱].
ربات های راه رونده ی دوپا به دلیل توانایی حرکتی خود، قابلیت های خاص و منحصربه فردمانند بالا رفتن از پله، حرکت در زمینه های ناهموار و کار کردن در شرایطی مثل محیط زندگی انسان را نسبت به دیگر ربات های متحرک دارا می باشد. با توجه اینکه ربات های فوق دارای جای پای مستقل برای حرکت می باشند، قابلیت حرکت آن ها در محیط ناهموار بیشتر از ربات های چرخ دار می باشد که برای حرکت نیاز به محیطی کم و پیش صاف و پیوسته دارند.
در یک ربات دو پا سه حالت اصلی حرکت دینامیکی شامل قدم زدن، دویدن و پریدن قابل دستیابی است. ما از بسیاری از روش های متنوع مدل سازی و کنترل ربات دوپا، تلاش کرده ایم تا استراتژی های کنترل و همچنین استراتژی های مسیریابی را برای ربات های دوپا / انسان نما مبتنی بر ZMP و سایر روش ها را گردآوری کرده و آن ها را به طور سیستماتیک معرفی کنیم. طراح باید پیچیدگی محاسباتی طرح های کنترل هدف را که به دلیل درجات آزادی DOF بزرگ مربوط به ربات های دوپا / انسان نما ایجاد شده است را در نظر بگیرد.
فهرست مطالب
۱-۱- مقدمه
۱-۲- بیان مسئله
۱-۳- اهمیت و ضرورت تحقیق
۱-۴- کنترل ربات دوپا با استفاده از روش ZMP
۱-۴-۲- بهبود مسیریابی با استفاده از روش ZMP
۱-۴-۳- مسیریابی ربات راه رونده بر اساس ZMP
۱-۵- مسیریابی ربات راه رونده با استفاده از روش مرجع آنلاین
۱-۶- روش های کنترل تعادل ربات دوپا
۱-۶-۲- کنترل ربات دوپا با استفاده از روش سطح پایین
۱-۷- بررسی روش های بهینه سازی ربات دوپا
۱-۷-۱- کنترل و مسیریابی با الگوریتم PSo
۱-۷-۲- تحلیل الگوریتم موچگان در مسیریابی ربات های راه رونده
۱-۸- روش های مسیریابی و کنترل ربات دوپا بر اساس Real time
۱-۸-۱- بهبود مسیریابی ربات دوپا با استفاده از الگوریتم کنترلی هیبرید
۱-۸-۲- ساختار الگوریتم کنترلی هیبریدی جهت پایداری ربات راه رونده
۱-۹- مسیریابی و کنترل ربات اگزاوسیون راه رونده
۱-۱۰- کنترل ربات راه رونده با استفاده از تطبیق زمانبندی گام ها
۱-۱۱- جمع بندی
منابع و مآخذ
برخی از مراجع
Al-Shuka, Hayder, et al. “Walking pattern generators of biped robots using a linear pendulum model with compensated ZMP.” (2024)
(Seiwald, Philipp, et al. “Quintic Spline Collocation for Real-Time Biped Walking-Pattern Generation with variable Torso Height.” IEEE-RAS International Conference on Humanoid Robots. (2019
(Seiwald, Philipp, et al. “Quintic Spline Collocation for Real-Time Biped Walking-Pattern Generation with variable Torso Height.” IEEE-RAS International Conference on Humanoid Robots. (2021
(Kajita, Shuuji, et al. “Biped Gait Control Based on Spatially Quantized Dynamics. IEEE-RAS 18th International Conference on Humanoid Robots (Humanoids). IEEE, (2019
Joe, Hyun-Min, and Jun-Ho Oh. “Balance recovery through model predictive control based on capture point dynamics for biped walking robot.” Robotics and Autonomous Systems ۱۰۵ (۲۰۱۸): ۱-۱۰
Gupta, Surbhi, and Amod Kumar. “A brief review of dynamics and control of underactuated biped robots.” Advanced Robotics ۳۱٫۱۲ (2023): ۶۰۷-۶۲۳
.فقط مشتریانی که این محصول را خریداری کرده اند و وارد سیستم شده اند میتوانند برای این محصول دیدگاه(نظر) ارسال کنند.
117,900 تومان


نقد و بررسیها
هنوز بررسیای ثبت نشده است.